Chi tiết sản phẩm
Synchro / Resolver-Digital Converter
(Dòng HSDC / HRDC174)
1. Đặc điểm sản phẩm (xem Hình 1 để xem bên ngoài và Bảng 1 cho các kiểu máy)
Chuyển đổi cách ly vi sai bên trong
Độ phân giải: 12 bit, 14 bit
Đầu ra chốt ba trạng thái
Tốc độ theo dõi liên tục cao
Gói vỏ kim loại sương muối 32 dây
MCM mật độ cao lắp ráp
Công suất chống tĩnh điện 2000V
Pin-to-pin tương thích với sản phẩm SDC / RDCl740 / 1741/1742 của công ty AD
Kích thước: 44,2 × 28,9 × 7,2mm3; trọng lượng: 22g
Hình 1 Hình ảnh bên ngoài của sê-ri HSDC / HRDC174
2. Phạm vi áp dụng
Hệ thống thiết bị bay;
Hệ thống điều khiển pháo binh;
Hệ thống điều khiển điện tử;
Hệ thống điều khiển radar;
Hệ thống định vị tàu biển;
Hệ thống giám sát anten;
Hệ thống rô bốt;
Máy tiện cnc;
Hệ thống điều khiển tự động khác nhau Bảng 1 các mẫu sản phẩm
12-bit 14-bit
Đồng bộ Người phân giải Đồng bộ Người phân giải
HSDCl742-X11 HRDCl742-X13 HSDCl744-X11 HRDCl744-X13
HSDCl742-X12 HRDCl742-X14 HSDCl744-X12 HRDCl744-X14
HSDCl742-X41 HRDCl742-X18 HSDCl744-X41 HRDCl744-X18
HSDCl742-X42 HRDCl742-X23 HSDCl744-X42 HRDCl744-X23
HSDCl742-X21 HRDCl742-X24 HSDCl744-X21 HRDCl744-X24
HSDCl742-X22 HRDCl742-X28 HSDCl744-X22 HRDCl744-X28
HRDCl742-X43 HRDCl744-X43
HRDCl742-X44 HRDCl744-X44
HRDCl742-X48 HRDCl744-X48
3. Lập dàn ý
Các sản phẩm sê-ri HSDC / HDC174 là bộ phân giải / đồng bộ hóa theo dõi liên tục 12-bit hoặc 14-bit tích hợp cho bộ chuyển đổi kỹ thuật số được thiết kế theo nguyên tắc servo loại II. Dòng sản phẩm này áp dụng quy trình MCM, các yếu tố cốt lõi sử dụng các chip đặc biệt do viện của chúng tôi phát triển độc lập. Sản phẩm sử dụng gói vỏ kim loại chống phun muối sâu DIL 32 dây với khối lượng nhỏ và trọng lượng nhẹ, tương thích với pin-to-pin với các sản phẩm SDC / RDC1740 / 1741/1742 của công ty AD, Hoa Kỳ.
Việc thiết kế và sản xuất HSDC / HRDCl74 đáp ứng các yêu cầu của GJB 2438A-2002 “Đặc điểm kỹ thuật chung cho mạch tích hợp lai” và đặc điểm kỹ thuật sản phẩm với cấp đảm bảo chất lượng là H. 4. Hiệu suất kỹ thuật (Bảng 2, Bảng 3)
Bảng 2 Các điều kiện định mức và điều kiện vận hành khuyến nghị
Tối đa giá trị đánh giá tuyệt đối Điện áp cung cấp Vs: ± 17,25VDC
Điện áp cung cấp logic VL: + 7V
Phạm vi nhiệt độ lưu trữ: -65 ℃ ~ + 150 ℃
Điều kiện hoạt động được đề xuất Điện áp cung cấp Vs: ± 15 ± 0,75V
Điện áp nguồn 5V: 5 ± 0,25V
Giá trị hiệu dụng của điện áp tham chiếu VRef: 115V, 26V, 11,8V
Giá trị hiệu dụng của điện áp tín hiệu V1: 90V, 26V, 11,8V
Tần số tham chiếu f *: 400Hz, 50Hz, 2.6kHz
Phạm vi nhiệt độ hoạt động TA: -55 ℃ ~ 125 ℃
Lưu ý: * cho biết nó có thể được tùy chỉnh theo yêu cầu của người dùng.
Bảng 3 Đặc tính điện (-55 ~ + 125 ℃)
Đặc trưng Sê-ri HSDC / HRDC1740 Sê-ri HSDC / HRDC1744 Đơn vị Nhận xét
Sự chính xác ± 8,5 (tối đa) ± 5,3 (tối đa) Phút góc
Theo dõi tốc độ 36 (điển hình) 27 (điển hình) r / giây
Nghị quyết 12 14 Chút
Tín hiệu và tần số tham chiếu 50 ~ 2600 50 ~ 2600 Hz
Tín hiệu điện áp đầu vào 2 ~ 90 2 ~ 90 V
Điện áp đầu vào tham chiếu 2 ~ 115 2 ~ 115 V
Trở kháng đầu vào tín hiệu 90V Một đầu 100 100 kΩ
Dấu hiệu Khác biệt 200 200 kΩ
26V Một đầu 28 28 kΩ
Dấu hiệu Khác biệt 56 56 kΩ
11,8V Một đầu 13 13 kΩ
Dấu hiệu Khác biệt 26 26 kΩ
Trở kháng đầu vào tham chiếu 115V Một đầu 127 127 kΩ
Thẩm quyền giải quyết Khác biệt 254 254 kΩ
26V Một đầu 28 28 kΩ
Thẩm quyền giải quyết Khác biệt 56 56 kΩ
90V Một đầu 100 100 kΩ
Thẩm quyền giải quyết Khác biệt 200 200 kΩ
Gia tốc không đổi 80000 (tối thiểu) 56000 (tối thiểu) s2 Đảm bảo thiết kế
Bước đáp ứng 75 (tối đa) 100 (tối đa) ms
Nguồn cung hiện tại + VS + 15V 35 (tối đa) 35 (tối đa) mA
-VS + 15V 35 (tối đa) 35 (tối đa) mA
VL + 5V 56 (tối đa) 56 (tối đa) mA
Sự tiêu thụ năng lượng 1,4 (tối đa) 1,4 (tối đa) W
Thời gian giải quyết hoặc giải phóng 80 (tối đa) 80 (tối đa) ns
Cài đặt thời gian 640 (tối đa) 640 (tối đa) ns
Độ rộng xung bận 200 ~ 600 (điển hình 400) 200 ~ 600 (điển hình 400) ns
Công suất tải 2 phút.) 2 phút.) TTL
Đầu ra kỹ thuật số VOH 3,3 (tối thiểu) 3,3 (tối thiểu) VDC
VOL 0,7 (tối đa) 0,7 (tối đa) VDC
Công suất tải 3 (tối đa) 3 (tối đa) TTL
Lựa chọn dải nhiệt độ hoạt động 8YZ -55 ~ + 125 -55 ~ + 125 ℃
5. Nguyên tắc hoạt động (Hình 2 và Hình 3)
Tín hiệu đầu vào của bộ đồng bộ hóa (hoặc bộ phân giải) được chuyển đổi thành tín hiệu trực giao thông qua cách ly vi phân bên trong:
Vsin u003d KE0sin (ωt + α) sinθ (sin)
Vcos u003d KE0sin (ωt + α) cosθ (cos)
Trong đó, θ là góc đầu vào tương tự.
Hai tín hiệu này và góc kỹ thuật số φ của bộ đếm thuận nghịch bên trong được nhân trong hệ số nhân của hàm sin và côsin và tín hiệu lỗi thu được sau khi xử lý:
KE0sin (ωt + α) (sinθ cosφ -cosθ sinφ)
tức là KE0sin (ωt + α) sin (θ-φ)
Tín hiệu này được gửi đến bộ dao động điều khiển bằng điện áp sau khi khuếch đại, phân biệt pha, lọc tích hợp. Nếu θ-φ ≠ 0, bộ dao động điều khiển bằng điện áp sẽ xuất ra các xung và bộ đếm thuận nghịch sẽ đếm chúng cho đến khi θ-φ u003d 0. Trong quá trình này, bộ chuyển đổi luôn theo dõi sự thay đổi của góc đầu vào.
Hình 2 Sơ đồ khối cho nguyên tắc hoạt động
Hình 3 Biểu đồ trình tự thời gian để chuyển xe buýt
đầu vào logic chỉ ngăn chặn việc truyền dữ liệu từ bộ đếm thuận nghịch đến chốt đầu ra mà không làm gián đoạn hoạt động của vòng theo dõi. Khi hệ thống In ức chế được giải phóng, một xung sẽ được tạo tự động, được sử dụng để cập nhật dữ liệu đầu ra.
đầu vào xác định trạng thái của dữ liệu đầu ra. Trong khi Logic Hi làm cho đầu ra xuất hiện ở trạng thái trở kháng cao; Logic Low chuyển dữ liệu trong chốt đến các chân đầu ra. bắt đầu dữ liệu 8 bit cao là hợp lệ, trong khi bắt đầu dữ liệu 6 bit thấp là hợp lệ (HSDC / HRDC1742 thuộc loại 4 bit thấp).
Bận
Khi đầu vào của bộ chuyển đổi thay đổi, Busy xuất ra một nhóm các xung ở mức CMOS, tần số của nó được xác định bởi tốc độ quay cao nhất. Cạnh rơi của xung Busy kích hoạt chốt để cập nhật dữ liệu và dữ liệu đầu ra có giá trị sau khi tối đa. Độ trễ 600ns. Chiều rộng điển hình của xung Busy là 400ns. Khả năng chịu tải của đầu ra là 3TTL.
(1) Các phương pháp và trình tự thời gian truyền dữ liệu
Có hai phương pháp sau để truyền dữ liệu:
Chế độ ①
Sau 640ns mức logic thấp, dữ liệu đầu ra là hợp lệ và bộ chuyển đổi nhận ra việc truyền dữ liệu qua và. Sau khi phát hành In ức chế, hệ thống sẽ tự động tạo ra một xung có độ rộng của nó bằng với xung Busy để cập nhật dữ liệu.
② Chế độ bán thân:
Tại cạnh lên của xung Busy, bộ đếm có thể đảo ngược ba trạng thái sẽ đếm; ở cạnh giảm dần của xung Busy, bên trong nó tạo ra một xung chốt với độ rộng của nó bằng xung Busy để cập nhật dữ liệu của chốt ba trạng thái, trình tự thời gian truyền dữ liệu được thể hiện trong Hình 3, nói cách khác , sau 600ns mức logic Bận ở mức thấp, việc truyền dữ liệu ổn định là hợp lệ. Trong chế độ đọc không đồng bộ, đầu ra Busy là một chuỗi xung ở mức CMOS, độ rộng của mức cao và thấp của nó phụ thuộc vào tần số hoạt động và tốc độ quay của thiết bị được chọn.
(2) Khả năng tương thích
Khi các sản phẩm sê-ri HSDC / HRDC174 được sử dụng trong điều kiện của tín hiệu không danh định và điện áp tham chiếu không danh định, các điện trở tỷ lệ được kết nối nối tiếp ở đầu tín hiệu và đầu vào kích thích của chúng để nhận ra khả năng tương thích.
Ví dụ 1: Kết nối HSDC1742-441 cho điện áp kích thích / điện áp tín hiệu / tần số 36V / 26V / 400Hz được thể hiện trong Hình 4:
Ví dụ 2: Kết nối HRDC1742-418 cho điện áp kích thích / điện áp tín hiệu / tần số 36V / 26V / 400Hz được thể hiện trong Hình 5:
Hình 4 Kết nối HSDC1742-411
Hình 5 Kết nối HSDC1742-418 R1 u003d (V1 - giá trị danh nghĩa V1) × 1,11 k
u003d (26 V- 11,8 V) × 1,11 k
u003d 15,8 kΩ
R2 u003d (VRef - giá trị danh nghĩa VRef) × 1,11 k
u003d (36 - 26) × 1,11 k
u003d 11,1 kΩ
R3 u003d (V1 - giá trị danh nghĩa V1) × 1,11 k
u003d (26 V- 11,8 V) × 1,11 k
u003d 15,8 kΩ
R4 u003d (VRef - Giá trị danh nghĩa VRef) × 1,11 k
u003d (36 - 26) × 1,11 k
u003d 11,1 kΩ
(3) Hành vi năng động
Chức năng truyền của bộ chuyển đổi được cho trong Hình 6:
Độ lợi vòng kín:
Độ lợi vòng kín:
θin + θout
Hình 6 Chức năng chuyển giao
Mô hình: HSDC / HRDC1742
Ở đây, Ka u003d 80000, T1 u003d 0,0087, T2 u003d 0,001569
(4) Lỗi tăng tốc
Bộ chuyển đổi được thiết kế bằng cách sử dụng nguyên tắc theo dõi của vòng lặp servo loại II, vì vậy về mặt lý thuyết, nó không có lỗi tốc độ trễ, nhưng có lỗi tăng tốc. Lỗi này có thể được xác định như sau bằng cách sử dụng hằng số gia tốc K của bộ chuyển đổi:
Ka u003d
Dưới đây là ví dụ để tính toán lỗi theo dõi của bộ chuyển đổi 14 bit HSDC1744 bằng cách sử dụng hằng số gia tốc Ka:
Ka u003d 56000, gia tốc 50 vòng / s2
Lỗi của bit ít quan trọng nhất u003d u003d 14,62LSBs
6. Các đường đặc tính điển hình (Hình 7 và Hình 8)
Tần số / Hz
Hình 7 Biểu đồ độ lợi của HSDC / HRDC1742
Tần số / Hz
Hình 8 Biểu đồ độ lợi của HSDC / HRDC1742
7. Đường cong MTBF (Hình 9)
Nhiệt độ / ℃
Hình 9 Đường cong nhiệt độ MTBF 8. Ký hiệu chân (Hình 10, Bảng 4)
Hình 10 Ghim (Hình dưới)
(Lưu ý: theo GJB / Z299B-98, dự kiến tình trạng mặt đất tốt)
Bảng 4 Ký hiệu chân
Ghim Biểu tượng Hàm số Ghim Biểu tượng Hàm số
1 D1 Đầu ra kỹ thuật số 1 (MSB) 17② NC / S4 Không có kết nối / đầu vào trình phân giải S4
2 D2 Đầu ra kỹ thuật số 2 18 S3 Đầu vào phân giải / đồng bộ hóa S3
3 D3 Đầu ra kỹ thuật số 3 19 S2 Đầu vào phân giải / đồng bộ hóa S2
4 D4 Đầu ra kỹ thuật số 4 20 S1 Đầu vào phân giải / đồng bộ hóa S1
5 D5 Đầu ra kỹ thuật số 5 21 NC Không có kết nối
6 D6 Đầu ra kỹ thuật số 6 22 NC Không có kết nối
7 D7 Đầu ra kỹ thuật số 7 23 Trường hợp Trường hợp
8 D8 Đầu ra kỹ thuật số 8 24④ NC 或 (Vel) * Không có kết nối (hoặc tốc độ đầu ra)
9 D9 Đầu ra kỹ thuật số 9 25③ Bật 4-bit / 6-bit thấp
10 D10 Đầu ra kỹ thuật số 10 26 Bật 8-bit cao
11 D11 Đầu ra kỹ thuật số 11 27 Bận Tín hiệu "bận"
12 D12 Đầu ra kỹ thuật số 12 28 Ức chế
13 NC / D13 Không có kết nối / đầu ra kỹ thuật số 13 29 + VS + Nguồn 15V
14 NC / D14 Không có kết nối / đầu ra kỹ thuật số 14 30 GND Đất
15 RLo Kết thúc thấp của đầu vào tín hiệu tham chiếu 31 -VS -15V điện
16 RHi Đầu vào tín hiệu tham chiếu cao cấp 32 VLo Nguồn + 5V
Lưu ý: ① Đối với bộ chuyển đổi sê-ri HSDC1742 và HRDC1742, chân 13 và 14 không được kết nối;
② Đối với HSDC174X, chân 17 không được kết nối; đối với HRDC174X, chân 17 là đầu vào cuối của trình phân giải S4;
③ Đối với bộ chuyển đổi sê-ri HSDC1742 và HRDC1742, chân 25 dành cho Bật điều khiển 4 bit thấp;
④ Khi có yêu cầu về tốc độ, nó được dẫn ra từ chân 24.
9. Bảng giá trị khối lượng (Bảng 5)
Bảng 5 Bảng giá trị khối lượng
Chút Góc Chút Góc Chút Góc
1 180.0000 6 5.6250 11 0,1758
2 90.0000 7 2,8125 12 (đối với LSB 12-bit) 0,0879
3 45.0000 8 1.4063 13 0,0439
4 22.5000 9 0,7031 14 (cho LSB 14-bit) 0,0220
5 11.2500 10 0,3516
10. Sơ đồ kết nối cho ứng dụng điển hình (Hình 11)
Ghi chú:
(1) Điện áp trên chân 29 và chân 31 phải là ± 15 V và không được kết nối ngược lại. Nguồn logic kỹ thuật số + 5V được kết nối với chân 32.
(2) Giữa nguồn điện và đất phải mắc song song tụ gốm 0,1µF và tụ điện 6,8µF.
(3) Chốt được đánh dấu bằng Case đã được kết nối với vỏ.
(4) Đầu ra kỹ thuật số của HSDC / HRDC1742 là chân 1 đến chân 12, chân 13 và 14 không được kết nối.
Hình 11 Sơ đồ kết nối cho ứng dụng điển hình
(5) Tham chiếu được kết nối với RLo trên chân 15 và RHi trên chân 16. Trong trường hợp đồng bộ, các tín hiệu được kết nối với S1, S2 và S3 theo quy ước sau:
sin (ωt + α) sinθ
sin (ωt + α) sin (θ + 120o)
sin (ωt + α) sin (θ + 240o)
Trong trường hợp bộ phân giải, các tín hiệu được kết nối với S1, S2, S3 và S4 theo các quy ước sau:
sin (ωt + α) sinθ
sin (ωt + α) cosθ
(6) Đối với bộ phân giải, chân 17 là S4 và để đồng bộ hóa, chân 17 không được kết nối.
11. Thông số kỹ thuật gói (đơn vị: mm) (Hình 12, Bảng 6 và 7)
Hình 8 Hình ảnh bên ngoài của gói hàng Bảng 6 Các ký hiệu và giá trị danh nghĩa
Biểu tượng Giá trị danh nghĩa
A 7.2
Φb 0,45
D 44,2
E 28,9
e 2,54
e1 22,86
L 5 phút
Bảng 7 Vật liệu vỏ
Mô hình trường hợp Tiêu đề Tiêu đề mạ Che Bao phủ mạ Chất liệu ghim Mạ pin Phong cách niêm phong Nhận xét
LÊN4429- 32a Kovar (4J29) Ni Hợp kim Fe-Ni (4J42) Ni Kovar (4J29) Ni / Au Bao bì phù hợp Lớp phủ của chân 23 là Ni
Lưu ý: nhiệt độ của chân hàn không được vượt quá 300 ℃ trong vòng 10 giây.
12. Phím đánh số bộ phận (Hình 13)
Hình 13 Phím đánh số bộ phận
Lưu ý: khi điện áp tín hiệu ở trên và điện áp chuẩn (Z) không phải là tiêu chuẩn, chúng sẽ được cung cấp như sau:
(ví dụ: điện áp tham chiếu 5V và điện áp tín hiệu 3V được biểu thị bằng -5/3)
Thận trọng khi sử dụng
Điện áp cung cấp phải được giữ ở điện áp đúng cực.
Khi giá trị tối đa vượt quá giá trị định mức tuyệt đối, thiết bị có thể bị hỏng.
Trong quá trình lắp ráp, đáy của sản phẩm phải vừa khít với bảng mạch để tránh làm hỏng các chốt và phải bổ sung thêm lớp chống va đập, nếu cần.
Không uốn cong các sơ đồ chân, nếu không sẽ gây ra gãy chất cách điện, ảnh hưởng đến tính chất làm kín.
Khi người dùng đặt hàng sản phẩm, các chỉ số hiệu suất điện chi tiết phải tham khảo tiêu chuẩn doanh nghiệp có liên quan.
Synchro / Resolver-Digital Converter
(Dòng HSDC / HRDC1746)
1. Tính năng (xem Hình 1 để xem bên ngoài và Bảng 1 cho các kiểu máy)
Chuyển đổi cách ly vi sai bên trong
Độ phân giải: 16 bit
Đầu ra chốt ba trạng thái
Theo dõi không bị gián đoạn trong quá trình truyền dữ liệu
Gói vỏ kim loại 32 dây
Kích thước: 45,39 × 29,0 × 7,2mm2; Trọng lượng: 28g
Hình 1 Hình ảnh bên ngoài của sê-ri HSDC / HRDC1746 Bảng 1 Các mẫu sản phẩm
HRDC1746 418
HRDC1746 414
2. Phạm vi áp dụng
Hệ thống thiết bị bay; hệ thống điều khiển servo quân sự; hệ thống điều khiển pháo; hệ thống điện tử hàng không; hệ thống điều khiển radar; hệ thống định vị tàu hải quân; giám sát ăng ten; công nghệ rô bốt, máy công cụ điều khiển số bằng máy tính (CNC); và hệ thống điều khiển tự động hóa khác.
3. Lập dàn ý
Bộ chuyển đổi đồng bộ / phân giải sê-ri HSDC / HRDC1746 - bộ chuyển đổi kỹ thuật số được thiết kế trên nguyên tắc theo dõi servo loại II và sử dụng đầu vào cách ly vi sai, đầu ra dữ liệu thông qua chế độ chốt ba trạng thái, nó thích hợp cho việc chuyển đổi tín hiệu tương tự / tín hiệu kỹ thuật số của ba -đồng bộ hóa dây và bộ phân giải bốn dây. Với tốc độ chuyển đổi nhanh và hiệu suất ổn định và đáng tin cậy, thiết bị này có thể được ứng dụng rộng rãi trong hệ thống đo góc và điều khiển tự động.
Sản phẩm này được làm bằng quy trình tích hợp màng dày và là gói kim loại kín hoàn toàn DIP 32 dây. Thiết kế và sản xuất sản phẩm phải đáp ứng các yêu cầu của GJB2438A-2002 “Đặc điểm kỹ thuật chung của mạch tích hợp lai” và thông số kỹ thuật chi tiết cho sản phẩm.
4. Hiệu suất kỹ thuật (Bảng 2, Bảng 3)
Bảng 2 Các điều kiện định mức và điều kiện vận hành khuyến nghị
Tối đa giá trị đánh giá tuyệt đối Điện áp cung cấp Vs: ± 17,25VOC
Điện áp logic VL: + 7V
Phạm vi nhiệt độ lưu trữ: -55 ~ + 150 ℃
Điều kiện hoạt động được đề xuất Điện áp cung cấp Vs: ± 15 ± 5%
Giá trị hiệu dụng của điện áp tham chiếu VRef: ± 10% giá trị danh định
Giá trị hiệu dụng của điện áp tín hiệu Vi: ± 5% giá trị danh định
Tần số của tín hiệu tham chiếu f *: ± 10% giá trị danh nghĩa
Độ lệch pha giữa tín hiệu và kích thích: < ± 10%
Dải nhiệt độ hoạt động TA: 40 ~ + 105 ℃
Bảng 3 Đặc tính điện
Đặc trưng Sê-ri HSDC / HRDC1746 Nhận xét
Tối thiểu. Tối đa
Độ chính xác / phút góc 2,6 2,6
Tốc độ theo dõi: rps 3 3
Độ phân giải / bit 16
Tín hiệu và tần số tham chiếu / Hz 50 2,6k
Điện áp tín hiệu (giá trị hiệu dụng) / V 2 90
Điện áp tham chiếu (giá trị hiệu dụng) / V 2 115
Lưu ý: * cho biết nó có thể được tùy chỉnh theo yêu cầu của người dùng.
5. Nguyên tắc hoạt động
Tín hiệu đầu vào đồng bộ (hoặc tín hiệu đầu vào của bộ phân giải) được chuyển đổi thành tín hiệu trực giao thông qua cách ly vi phân nội bộ:
V1-KE0sinθ sinωt
V2-KE0cosθ sinωt
Trong đó, θ là góc đầu vào mô phỏng.
Tín hiệu trực giao được nhân với góc kỹ thuật số nhị phân φ trong bộ đếm thuận nghịch bên trong trong hệ số nhân hàm sin-cosin và thu được một hàm lỗi:
KE0sinθ cosφ sinωt-KE0cosθ sinφ sinωt u003d KE0sin (θ-φ) sinωt
Thông qua khuếch đại lỗi, phân biệt pha và lọc của hàm lỗi này, sin (θ-φ) thu được, khi θ-φ u003d 0 (trong độ chính xác của bộ chuyển đổi), lỗi này sẽ làm cho xung hiệu chỉnh đầu ra dao động điều khiển điện áp thay đổi góc kỹ thuật số nhị phân φ của bộ đếm thuận nghịch để làm cho giá trị φ đầu ra bằng với đầu vào θ trong độ chính xác của bộ chuyển đổi, hệ thống trở nên ổn định và có thể theo dõi sự thay đổi của góc đầu vào φ. Bằng cách này, một góc kỹ thuật số nhị phân φ đại diện cho góc trục đầu vào θ thu được trên bộ đếm thuận nghịch (Hình 2).
Hình 2 Sơ đồ khối mạch
(1) Đặc điểm động
Chức năng truyền của bộ chuyển đổi được thể hiện trong Hình 3:
Tăng vòng lặp mở:
Chức năng vòng kín:
Đối với mô-đun của mô hình này, Ka u003d 48000 / S2, T1 u003d 7,1ms, T2 u003d 1,25ms
Hình 3 Chuyển chức năng của bộ chuyển đổi
(2) Phương thức truyền dữ liệu và trình tự thời gian
Kiểm soát chọn chip
Chân này là chân đầu vào của logic điều khiển, chức năng của nó là xuất dữ liệu tới bộ chuyển đổi để thực hiện điều khiển ba trạng thái. Mức thấp là hợp lệ, dữ liệu đầu ra của bộ chuyển đổi chiếm bus dữ liệu. Khi ở mức cao, chân đầu ra dữ liệu của bộ chuyển đổi ở ba trạng thái, thiết bị không chiếm bus.
Byte chọn
Chân này là chân đầu vào logic điều khiển, chức năng của nó là thực hiện điều khiển lựa chọn bên ngoài trên dữ liệu đầu ra của bộ chuyển đổi ở chế độ truyền là bus dữ liệu 8 bit hoặc bus dữ liệu 16 bit. Khi yêu cầu chế độ truyền bus dữ liệu 16 bit, hãy giữ chân logic này ở mức cao, dữ liệu sẽ được truyền trong bus, đầu ra byte cao ở chân D1 đến D8 (D1 là bit cao) và byte thấp ở D9 đến D16 . Khi cần chế độ truyền bus dữ liệu 8 bit, dữ liệu được lấy tại chân D1 đến D8 (sắp xếp từ cao xuống thấp), và 8 bit cao và 8 bit thấp được thu thập thông qua hai chuỗi thời gian, nói cách khác, khi Byte chọn là mức logic cao, 8 bit cao được đưa ra và khi nó ở mức logic thấp, 8 bit thấp được đưa ra.
Kiểm soát khóa dữ liệu (Cấm tín hiệu)
Chân này là chân đầu vào của logic điều khiển, chức năng của nó là xuất dữ liệu ra bên ngoài cho bộ chuyển đổi để nhận ra điều khiển chốt hoặc bỏ qua tùy chọn. Ở mức cao, dữ liệu đầu ra của bộ chuyển đổi được xuất trực tiếp mà không cần chốt, hãy xem biểu đồ trình tự thời gian của quá trình truyền dữ liệu. Ở mức thấp, dữ liệu đầu ra của bộ chuyển đổi được chốt, vòng lặp nội bộ không bị gián đoạn và theo dõi vẫn hoạt động mọi lúc, nhưng bộ đếm không xuất dữ liệu. Khi cần truyền dữ liệu, đầu tiên bộ chuyển đổi thực hiện điều khiển tín hiệu để khóa dữ liệu từ cao xuống thấp, giữ mức logic thấp trong 640ns, sau đó đặt đầu vào ở mức thấp (lúc này thiết bị chiếm bus dữ liệu), rồi lấy dữ liệu thông qua Byte select, sau đó chuyển tất cả logic điều khiển lên cao để làm mới và chốt dữ liệu để sẵn sàng chuyển dữ liệu tiếp theo, vui lòng tham khảo biểu đồ trình tự thời gian của quá trình truyền dữ liệu Hình 4 và Hình 5.
(3) Phương pháp suy giảm của tín hiệu đầu vào (Hình 4 và Hình 5)
Hình 4 Chuỗi thời gian của truyền bus 16 bit
Hình 5 Chuỗi thời gian của truyền bus 8 bit
6. Đường cong MTBF (Hình 6)
Hình 6 Đường cong nhiệt độ MTBF 7. Ký hiệu chân (Hình 7, Bảng 4)
Hình 7 Ghim (Hình dưới)
(Lưu ý: theo GJB / Z299B-98, dự kiến tình trạng mặt đất tốt)
Bảng 4 Ký hiệu chân
Ghim Biểu tượng Nghĩa Ghim Biểu tượng Nghĩa
1 NC Không có kết nối 17 NC Để lại không kết nối
2 D9 Đầu ra cho bit kỹ thuật số 9 18 RHi RHi đầu vào của trình phân giải
3 D10 Đầu ra cho bit kỹ thuật số 10 19 RLo RLo đầu vào của bộ phân giải quay
4 D11 Đầu ra cho bit kỹ thuật số 11 20 GND Đất
5 D12 Đầu ra cho bit kỹ thuật số 12 21 -VS -15V điện
6 D13 Đầu ra cho bit kỹ thuật số 13 22 + VS + Nguồn 15V
7 D14 Đầu ra cho bit kỹ thuật số 14 23 Điều khiển khóa kỹ thuật số
8 D15 Đầu ra cho bit kỹ thuật số 15 24 D1 Đầu ra cho bit kỹ thuật số 1
9 D16 Đầu ra cho bit kỹ thuật số 16 25 D2 Đầu ra cho bit kỹ thuật số 2
10 Chọn chip Bật kiểm soát 26 D3 Đầu ra cho bit kỹ thuật số 3
11 Bysel Byte chọn 27 D4 Đầu ra cho bit kỹ thuật số 4
12 S4 / NC① Đầu vào S4 / không có kết nối 28 D5 Đầu ra cho bit kỹ thuật số 5
13① S3 Đầu vào S3 29 D6 Đầu ra cho bit kỹ thuật số 6
14① S2 Đầu vào S2 30 D7 Đầu ra cho bit kỹ thuật số 7
15 S1 Đầu vào S1 31 D8 Đầu ra cho bit kỹ thuật số 8
16 NC Không có kết nối 32 NC Không có kết nối
Lưu ý: ① Đối với thiết bị HSDC, S4 không được sử dụng.
8. Bảng giá trị khối lượng (Bảng 5)
Bảng 5 Bảng giá trị khối lượng
Bit (MSB) Góc Bit (MSB) Góc Bit (MSB) Góc Bit (MSB) Góc
1 180.0000 5 11.2500 9 0,7031 13 0,0439
2 90.0000 6 5.6250 10 0,3516 14 0,0220
3 45.0000 7 2,8125 11 0,1758 15 0,0110
4 22.5000 8 1.4063 12 0,0879 16 0,0055
Kết nối của bộ chuyển đổi
± 15V, + 5V và GND phải được kết nối với các chân tương ứng trên bộ chuyển đổi, lưu ý rằng các cực của nguồn điện phải đúng, nếu không, bộ chuyển đổi có thể bị hỏng. Bạn nên kết nối điện dung bỏ qua 0,1μF và 6,8μF song song giữa mỗi đầu cuối nguồn điện và mặt đất.
Nguồn tín hiệu và nguồn kích thích được phép kết nối với S1, S2, S3 và S4 và kết thúc RHi và RLo trong phạm vi sai số 5%.
Đầu vào tín hiệu phải phù hợp với pha của nguồn kích từ để chúng có thể được kết nối chính xác với bộ biến đổi, các pha của chúng như sau:
RHi ~ RLo : VRsinωt
Đối với đồng bộ hóa, đầu vào tín hiệu là:
Đối với S1 ~ S3: sinθ sinωt
Đối với S3 ~ S2: sin (θ + 120o) sinωt
Đối với S2 ~ S1: sin (θ + 240o) sinωt
Đối với bộ phân giải, đầu vào tín hiệu là:
Đối với S1 ~ S3: sinθ sinωt
Đối với S2 ~ S4: cosθ sinωt
Lưu ý: không cho phép kết nối tín hiệu đầu vào của RHi, RLo, S1, S2, S3 và S4 với các chân khác vì sợ hư thiết bị.
10. Quy cách đóng gói (đơn vị: mm) (Hình 8, Bảng 6)
Hình 8 Hình ảnh bên ngoài của gói hàng
Bảng 6 Vật liệu vỏ
Mô hình trường hợp Tiêu đề Tiêu đề mạ Che Bao phủ mạ Chất liệu ghim Mạ pin Phong cách niêm phong Nhận xét
LÊN4429- 32a Kovar (4J29) Ni Hợp kim Fe-Ni (4J42) Ni Kovar (4J29) Ni / Au Bao bì phù hợp
Lưu ý: nhiệt độ của chân hàn không được vượt quá 300 ℃ trong vòng 10 giây.
11. Phím đánh số bộ phận (Hình 9)
Hình 9 Phím đánh số bộ phận
Lưu ý: khi điện áp tín hiệu ở trên và điện áp chuẩn (Z) không phải là tiêu chuẩn, chúng sẽ được cung cấp như sau:
(ví dụ: điện áp tham chiếu 5V và điện áp tín hiệu 3V phải được biểu thị bằng -5/3)
Thận trọng khi sử dụng
Cấp nguồn đúng cách, trong quá trình khởi động cần đấu nối chính xác cực âm và cực dương của nguồn điện để tránh tình trạng cháy nguồn.
Trong quá trình lắp ráp, đáy của sản phẩm phải vừa khít với bảng mạch để tránh làm hỏng các chốt và phải bổ sung thêm lớp chống va đập, nếu cần.
Không uốn cong các sơ đồ chân để tránh làm vỡ chất cách điện, ảnh hưởng đến tính chất làm kín.
Khi người dùng đặt hàng sản phẩm, các chỉ số hiệu suất điện chi tiết phải tham khảo tiêu chuẩn doanh nghiệp có liên quan.
Synchro / Resolver to Digital Converter
(Dòng HSDC / HRDC211)
1. Tính năng (xem Hình 1 để xem bên ngoài và Bảng 1 cho các kiểu máy)
Tần số kích thích: 50Hz, 400Hz, 2.6kHz
Độ phân giải: 10-bit, 12-bit, 14-bit
Tỷ lệ theo dõi cao
Đầu vào không tiêu chuẩn có thể điều chỉnh thông qua điện trở bên ngoài hoặc điều chỉnh ở đầu vào sản phẩm
Điện áp DC đầu ra tỷ lệ thuận với vận tốc góc
Tương thích với dòng SDC1700 của công ty AD của Mỹ
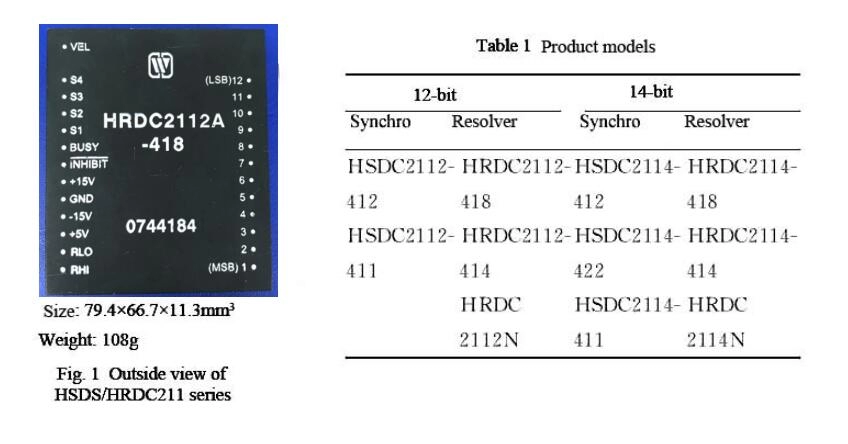
Kích thước: 79,4 × 66,7 × 11,8mm2
Trọng lượng: 108g
Hình 1 Hình ảnh bên ngoài của sê-ri HSDC / HRDC211 Bảng 1 Các mẫu sản phẩm
12-bit 14-bit
Đồng bộ Người phân giải Đồng bộ Người phân giải
HSDC2112-412 HRDC2112-418 HSDC2114-412 HRDC2114-418
HSDC2112-411 HRDC2112-414 HSDC2114-422 HRDC2114-414
HRDC 2112N HSDC2114-411 HRDC 2114N
2. Phạm vi áp dụng
Hệ thống Servo; hệ thống ăng ten; đo góc; công nghệ mô phỏng; điều khiển pháo binh; điều khiển máy công cụ công nghiệp
3. Lập dàn ý
Sê-ri này là bộ chuyển đổi đồng bộ / phân giải kỹ thuật số có cấu trúc mô-đun với bộ chuyển đổi cách ly SCOTT trạng thái rắn tích hợp, được thiết kế theo nguyên tắc của servo loại II và có thể theo dõi và chuyển đổi liên tục.
Nguồn hoạt động là ± 15V và nguồn + 5V DC. Có hai loại tín hiệu đầu ra: tín hiệu tham chiếu và đồng bộ ba dòng (bộ chuyển đổi SDC) hoặc bộ phân giải bốn dòng và tín hiệu tham chiếu (bộ chuyển đổi RDC); đầu ra thông qua các mã kỹ thuật số song song của hệ thống nhị phân.
4. Hiệu suất điện (Bảng 2, Bảng 3)
Bảng 2 Các điều kiện định mức và điều kiện vận hành khuyến nghị
Tối đa giá trị đánh giá tuyệt đối Điện áp cung cấp Vs: ± 17,5V
Điện áp cung cấp logic: + 7V
Phạm vi nhiệt độ lưu trữ: -65 ℃ ~ + 150 ℃
Điều kiện hoạt động được đề xuất Điện áp cung cấp + Vs: ± 15V
Điện áp cung cấp logic 5V VL: ± 5V
Giá trị hiệu dụng của điện áp tham chiếu VRef: 11,8V, 26V, 115V
Giá trị hiệu dụng của điện áp tín hiệu Vi: 11,8V, 26V, 90V
Tần số tham chiếu f *: 50Hz, 400Hz, 2.6kHz
Dải nhiệt độ hoạt động TA: 0 ~ 70 ℃, -40 ~ + 85 ℃
Lưu ý: * cho biết nó có thể được tùy chỉnh theo yêu cầu của người dùng.
5. Nguyên tắc hoạt động
Tín hiệu đầu vào đồng bộ (hoặc tín hiệu đầu vào của bộ phân giải) được chuyển đổi thành tín hiệu trực giao thông qua cách ly vi phân nội bộ:
V1-KE0sinθ sinωt , V2-KE0cosθ sinωt
Bảng 3 Đặc tính điện
Đặc trưng HRDC / HSDC2110 HRDS / HSDC2112 HRDC / HSDC2114 Đơn vị Nhận xét
± 10% dao động của tín hiệu và điện áp tham chiếu
Sự chính xác ± 10% dao động của tần số hoạt động ± 22 ± 8,5 ± 5,3 Phút góc
± 5% dao động cung cấp điện
5 (50Hz) 5 (50Hz) 1,38 (50Hz)
Theo dõi tốc độ 36 (400Hz) 36 (400Hz) 12 (400Hz) r / giây
75 (2,6kHz) 75 (2,6kHz) 25 (2,6kHz)
Nghị quyết Mã kỹ thuật số song song nhị phân 10 12 14 chút
Tín hiệu và tần số tham chiếu 50, 400, 2,6k Hz Không bắt buộc
Giá trị hiệu dụng của điện áp đầu vào tham chiếu 11,8, 26, 90 V Không bắt buộc
Giá trị hiệu dụng của điện áp đầu vào tham chiếu 11,8, 26, 115 V Không bắt buộc
Trở kháng đầu vào tín hiệu Tín hiệu 90V Một đầu 100 kΩ
Khác biệt 200 kΩ
Tín hiệu 26V Một đầu 28 kΩ
Khác biệt 56 kΩ
Tín hiệu 11,8V Một đầu 13 kΩ
Khác biệt 26 kΩ
Trở kháng đầu vào tham chiếu Tham chiếu 115V Một đầu 127 kΩ
Khác biệt 254 kΩ
Tham chiếu 26V Một đầu 28 kΩ
Khác biệt 56 kΩ
Tham chiếu 11,8V Một đầu 13 kΩ
Khác biệt 26 kΩ
Bước đáp ứng 50Hz 1500 tối đa
ms
400Hz 125 tối đa
2,6kHz 75max
Cung cấp hiệu điện thế + VS + 15V 18
mA
-VS + 15V 18
VL + 5V 2
Bận Độ rộng xung 200 ~ 600 ns
Dấu hiệu Công suất tải 3 tối đa TTL
Đầu ra kỹ thuật số VOH 2,4 phút V
VOL 0,4 tối đa V
Công suất tải 3 tối đa TTL
Trong đó, θ là góc đầu vào mô phỏng.
Tín hiệu trực giao được nhân với góc kỹ thuật số nhị phân φ trong bộ đếm thuận nghịch bên trong trong hệ số nhân hàm sin-cosin và thu được một hàm lỗi:
KE0sinθ cosφ sinωt-KE0cosθ sinφ sinωt u003d KE0sin (θ-φ) sinωt
Các tín hiệu được gửi đến bộ dao động điều khiển điện áp sau khi khuếch đại, phân biệt pha và lọc tích hợp, nếu θ-φ ≠ 0, bộ dao động điều khiển điện áp sẽ xuất xung để thay đổi dữ liệu trong bộ đếm thuận nghịch, cho đến khi θ-φ trở thành 0 trong độ chính xác của bộ chuyển đổi, trong quá trình này, bộ chuyển đổi luôn theo dõi sự thay đổi của góc đầu vào θ. Về nguyên lý làm việc, xem Hình 2.
Chức năng chuyển: sau đây là các thông số cho chức năng truyền của HSDC2112 và HSDC2114 (400Hz), đối với các model khác, vui lòng liên hệ trực tiếp với nhà sản xuất.
Hình 2 Sơ đồ khối cho nguyên tắc hoạt động của bộ chuyển đổi
HSDC2112 (400Hz)
θout (S) / θin (S) u003d
HSDC2114 (400Hz)
θout (S) / θin (S) u003d
(1) Truyền dữ liệu
Có hai phương pháp để đọc dữ liệu hợp lệ của bộ chuyển đổi như sau:
chế độ (đọc đồng bộ):
Đặt thành logic “0”, tại thời điểm này, bộ chuyển đổi sẽ ngừng theo dõi. Chờ 1µs, dữ liệu đầu ra lắng xuống. Đọc dữ liệu, lúc này dữ liệu đọc là dữ liệu hợp lệ tại thời điểm này (trễ 1µs). Đặt thành logic “1”, tại thời điểm này, bộ chuyển đổi sẽ bắt đầu theo dõi lại để sẵn sàng đọc dữ liệu hợp lệ tiếp theo.
Chế độ bận (đọc không đồng bộ):
Trong trường hợp chế độ đọc không đồng bộ, là logic “1” hoặc bị bỏ trống, vòng lặp bên trong của bộ chuyển đổi luôn ở trạng thái theo dõi. Cho dù vòng lặp bên trong đang ở trạng thái ổn định hay dữ liệu đầu ra có hợp lệ hay không phải được xác định thông qua trạng thái của tín hiệu Bận, khi tín hiệu Bận ở mức cao, điều đó có nghĩa là dữ liệu đang được chuyển đổi và dữ liệu tại thời điểm này là dữ liệu không hợp lệ không ổn định; khi tín hiệu Bận ở mức thấp, dữ liệu tại thời điểm này là dữ liệu hợp lệ ổn định và có thể được đọc ra. Ở chế độ đọc không đồng bộ, đầu ra Busy là dòng xung của mức TTL, độ rộng giữa liên quan đến tốc độ quay, hãy tham khảo biểu đồ tuần tự thời gian 3 để truyền dữ liệu.
Hình 3 Biểu đồ tuần tự thời gian của quá trình truyền dữ liệu
(2) Chế độ suy giảm của tín hiệu đầu vào
Nếu bộ đồng bộ hóa hoặc bộ phân giải mà người dùng sử dụng không phải là tiêu chuẩn, để làm cho điện áp tín hiệu đầu vào và điện áp kích thích đầu vào khớp với giá trị danh định của bộ chuyển đổi, người dùng có thể áp dụng phương pháp điện trở suy giảm bên ngoài được kết nối theo chuỗi, tức là cho mọi Vượt quá giá trị danh định 1V, kết nối điện trở 1,1kΩ nối tiếp ở đầu đầu vào tương ứng. Khi sử dụng bộ chuyển đổi, điện trở nối tiếp tại mỗi đầu nối phải được lựa chọn và trang bị chính xác, và vật liệu điện trở của cùng một lô phải được sử dụng để đảm bảo độ chính xác chuyển đổi của bộ chuyển đổi trong phạm vi nhiệt độ rộng, cứ 0,1% thì khớp lỗi của điện trở loạt sẽ tạo ra lỗi chuyển đổi góc 1,7 phút.
Nhà sản xuất khuyến cáo rằng nên thông báo cho nhà sản xuất để tùy chỉnh bộ phân giải hoặc đồng bộ hóa không chuẩn theo các thông số được yêu cầu khi người dùng sử dụng chúng.
6. Đường cong MTBF (Hình 4)
Hình 4 Đường cong nhiệt độ MTBF
(Lưu ý: theo GJB / Z299B-98, dự kiến tình trạng mặt đất tốt) 7. Ký hiệu chân (Hình 5, Bảng 4)
Lưu ý: ① cấu trúc trên phù hợp với HRDC2114
② Đối với SDC, không có chân S4.
③ Đối với thiết bị 12-bit, không có chân 13 và 14, đối với thiết bị 10-bit, không có chân 11, 12, 13 và 14.
Hình 5 Ghim (Hình trên)
Bảng 4 Ký hiệu chân
Ghim Biểu tượng Hàm số Ghim Biểu tượng Hàm số
1 D1 Bit đầu ra kỹ thuật số 1 (MSB) 15 Vel Đầu ra điện áp vận tốc góc
2 D2 Đầu ra kỹ thuật số bit 2 16 S4 Đầu vào tín hiệu
3 D3 Đầu ra kỹ thuật số bit 3 17 S3 Đầu vào tín hiệu
4 D4 Đầu ra kỹ thuật số bit 4 18 S2 Đầu vào tín hiệu
5 D5 Đầu ra kỹ thuật số bit 5 19 S1 Đầu vào tín hiệu
6 D6 Đầu ra kỹ thuật số bit 6 20 Bận Đầu ra tín hiệu bận
7 D7 Đầu ra kỹ thuật số bit 7 21 Ngăn chặn đầu vào tín hiệu
8 D8 Đầu ra kỹ thuật số bit 8 22 + 15V + Nguồn 15V
9 D9 Đầu ra kỹ thuật số bit 9 23 GND GND
10 D10 Đầu ra kỹ thuật số bit 10 (10-bit LSB) 24 -15V -15V điện
11 D11 Đầu ra kỹ thuật số bit 11 25 + 5V Nguồn + 5V
12 D12 Đầu ra kỹ thuật số bit 12 (10-bit LSB) 26 RLo Kết thúc thấp của đầu vào tín hiệu tham chiếu
13 D13 Đầu ra kỹ thuật số bit 13 27 RHi Kết thúc thấp của đầu vào tín hiệu tham chiếu
14 D14 Đầu ra kỹ thuật số bit 14 (10-bit LSB)
Lưu ý: ① Nguồn điện: + 15V, + 5V, GND.
② Đầu ra số nhị phân: lần lượt là 10 bit, 12 bit và 14 bit.
③ RHi, RLo: đầu vào tín hiệu kích từ.
④ S1, S2, S3 và S4: đầu vào tín hiệu của bộ phân giải hoặc đồng bộ hóa. (S4 không được sử dụng cho đồng bộ hóa)
⑤ Vel: tín hiệu vận tốc. Đó là tín hiệu điện áp, giá trị của nó tỷ lệ với tốc độ quay góc của trục.
⑥ Busy: Báo hiệu đang bận. Nó cho biết liệu dữ liệu chuyển đổi có đang ở trạng thái cập nhật hay không. Khi Busy ở mức cao, nó cho biết bộ chuyển đổi đang thực hiện chuyển đổi dữ liệu, dữ liệu xuất ra lúc này không hợp lệ; khi Busy ở mức thấp, dữ liệu trong bộ chuyển đổi ổn định và đầu ra dữ liệu tại thời điểm này là hợp lệ.
⑦: Đây là tín hiệu ức chế bên ngoài. Bằng tín hiệu này, trạng thái theo dõi bên trong có thể được kiểm soát, khi nó là logic “1”, bộ chuyển đổi ở trạng thái theo dõi bình thường bên trong, tại thời điểm này, tín hiệu Busy cho biết dữ liệu đầu ra có hợp lệ hay không, khi nào là logic “0 ”, Bộ chuyển đổi tạm thời ngừng theo dõi trạng thái, dữ liệu đầu ra vẫn ổn định và là dữ liệu đầu ra hợp lệ. Khi mức logic là “1”, bộ chuyển đổi sẽ bắt đầu theo dõi lại (thời gian khôi phục tối đa xấp xỉ bằng thời gian phản hồi bước tối đa). Ghim này đã được kéo lên bên trong.
8. Bảng giá trị khối lượng (Bảng 5)
Bảng 5 Bảng giá trị khối lượng
Chút Góc Chút Góc Chút Góc
1 (MSB) 180.0000 6 5.6250 11 0,1758
2 90.0000 7 2,8125 12 (đối với LSB 12-bit) 0,0879
3 45.0000 8 1.4063 13 0,0439
4 22.5000 9 0,7031 14 (cho LSB 14-bit) 0,0220
5 11.2500 10 (đối với LSB 10-bit) 0,3516
9. Sơ đồ kết nối cho ứng dụng điển hình (Hình 6)
(1) Kết nối của bộ chuyển đổi
± 15V, + 5V và GND phải được kết nối với các chân tương ứng trên bộ chuyển đổi, lưu ý rằng các cực của nguồn điện phải đúng, nếu không, bộ chuyển đổi có thể bị hỏng. Bạn nên kết nối song song tụ điện bỏ qua 0,1μF và 6,8μF giữa mỗi đầu nối nguồn điện và mặt đất.
Các đầu vào tín hiệu phải tương ứng với pha kích thích, pha của chúng như sau:
RHi ~ RLo: VRsinωt
Đối với đồng bộ hóa:
Đối với S1 ~ S3: sinθ sinωt
Đối với S3 ~ S2: sin (θ + 120o) sinωt
Đối với S2 ~ S1: sin (θ + 240o) sinωt
Đối với trình phân giải:
S1 ~ S3 为 : sinθ sinωt
S2 ~ S4 为 : cosθ sinωt
Hình 6 Sơ đồ kết nối cho ứng dụng điển hình
Lưu ý: không cho phép kết nối tín hiệu đầu vào của RHi, RLo, S1, S2, S3 và S4 với các chân khác vì sợ hư thiết bị.
(2) Giao diện với máy tính
Để ngăn chặn việc thu thập dữ liệu trong thời gian xung Busy ở mức cao và để đảm bảo thu được dữ liệu hợp lệ, kết nối trong Hình 7 có thể được áp dụng:
(3) Ứng dụng của bộ chuyển đổi
Bên cạnh việc được sử dụng trực tiếp để đo chính xác góc quay của bộ đồng bộ hoặc bộ phân giải, bộ chuyển đổi góc trục cũng có thể tạo thành hệ thống đo hai tốc độ hoặc hệ thống điều khiển đo lường kỹ thuật số khác có độ chính xác cao hơn.
Bên cạnh việc được sử dụng trực tiếp để đo chính xác góc quay của bộ đồng bộ hoặc bộ phân giải, bộ chuyển đổi góc trục cũng có thể tạo thành hệ thống đo hai tốc độ hoặc hệ thống điều khiển đo lường kỹ thuật số khác có độ chính xác cao hơn.
Hình 8 là một ví dụ về hệ thống hai tốc độ bao gồm bộ chuyển đổi. Hệ thống hai tốc độ được thiết lập trên nguyên tắc kết hợp giữa phép đo thô và chính xác có độ chính xác chuyển đổi cao hơn, hình cho thấy hệ thống chuyển đổi hai tốc độ bao gồm hai đồng bộ (hoặc bộ phân giải) được ghép nối thông qua hộp số, hai bộ chuyển đổi SDC và hai -bộ xử lý tốc độ HTSL19, đầu ra của nó đạt 19 bit.
Hình 7 Một mạch giao diện máy tính bên ngoài khả thi
Hình 8 Ứng dụng của hệ thống hai tốc độ của SDC
Hình 9 cho thấy một hệ thống servo điều khiển kỹ thuật số. Nó sử dụng vòng phản hồi tiêu cực của điều khiển kỹ thuật số do SDC cấu thành để đạt được điều khiển chính xác góc quay.
10. Thông số kỹ thuật gói (đơn vị: mm) (Hình 10)
Hình 9 Hệ thống servo điều khiển kỹ thuật số
Hình 10 Hình ảnh bên ngoài của gói hàng
11. Phím đánh số bộ phận (Hình 11)
Hình 11 Phím đánh số bộ phận
Lưu ý: khi điện áp tín hiệu ở trên và điện áp chuẩn (Z) không phải là tiêu chuẩn, chúng sẽ được cung cấp như sau:
(ví dụ: điện áp tham chiếu 5V và điện áp tín hiệu 3V được biểu thị bằng -5/3)
Thận trọng khi sử dụng
Cấp nguồn đúng cách, trong quá trình khởi động cần đấu nối chính xác cực âm và cực dương của nguồn điện để tránh tình trạng cháy nguồn.
Trong quá trình lắp ráp, đáy của sản phẩm phải vừa khít với bảng mạch để tránh làm hỏng các chốt và phải bổ sung thêm lớp chống va đập, nếu cần.
Khi người dùng đặt hàng sản phẩm, các chỉ số hiệu suất điện chi tiết phải tham khảo tiêu chuẩn doanh nghiệp có liên quan.
Synchro / Resolver to Digital Converter
(Dòng HSDC / HRDC27)
1. Tính năng (xem Hình 1 để xem bên ngoài và Bảng 1 cho các kiểu máy)
Độ phân giải: 12-bit, 14-bit
Tỷ lệ theo dõi cao
Tích hợp lai, gói vỏ kim loại
Đầu ra chốt ba trạng thái
Với tín hiệu vận tốc đầu ra Vel
Hoàn toàn tương thích với dòng AD1740
Kích thước: 45,39 × 29,0 × 7,2mm2
Trọng lượng: 26g
Hình 1 Hình ảnh bên ngoài của sê-ri HSDC / HRDC27 Bảng 1 Các mẫu sản phẩm
12-bit 14-bit
Đồng bộ Người phân giải Đồng bộ Người phân giải
HSDC2742 -412 HRDC2742 -414 HSDC2754 -612 HRDC2754 -414
HRDC2742 -418 HRDC2754 -418
HRDC2742-618 HRDC2754 -618
HRDC2754 -666
HRDC2754 -614
2. Phạm vi áp dụng
Hệ thống Servo; hệ thống ăng ten; đo góc; công nghệ mô phỏng; điều khiển pháo; điều khiển máy công cụ công nghiệp
3. Lập dàn ý
Sê-ri HSDC / HRDC27 là bộ chuyển đổi kỹ thuật số đồng bộ hóa / phân giải để theo dõi liên tục vòng lặp servo loại II, nó chốt song song và xuất dữ liệu được mã hóa nhị phân tự nhiên 12-bit hoặc 14-bit với gói kim loại dòng kép 32-dòng, có tính năng Ưu điểm của khối lượng nhỏ, trọng lượng nhẹ và độ tin cậy cao, v.v., nó được ứng dụng rộng rãi trong các hệ thống điều khiển tự động như hệ thống radar, hệ thống định vị, v.v.
Nguồn hoạt động là nguồn + 15V và + 5V DC. Các tín hiệu đầu vào được chia thành hai loại: tín hiệu đồng bộ và kích thích 3 dòng (bộ chuyển đổi SDC) hoặc bộ phân giải 4 dòng và tín hiệu kích thích (bộ chuyển đổi RDC) Đầu ra là mã số song song nhị phân. Bảng 2 Các điều kiện định mức và điều kiện vận hành khuyến nghị
Tối đa giá trị đánh giá tuyệt đối Điện áp cung cấp Vs: ± 17,25V
Điện áp logic VL: + 5.5V
Phạm vi nhiệt độ lưu trữ: -55 ℃ ~ 125 ℃
Điều kiện hoạt động được đề xuất Điện áp cung cấp Vs: ± 15V
Điện áp cung cấp VL: + 5V
Giá trị hiệu dụng của điện áp tham chiếu VRef: ± 10% giá trị danh định
Giá trị hiệu dụng của điện áp tín hiệu Vi: ± 5% giá trị danh định
Tần số tham chiếu f *: 50Hz ~ 2.6kHz
Dải nhiệt độ hoạt động TA: -40 ~ + 85 ℃ , -55 ~ + 105 ℃
Lưu ý: * cho biết nó có thể được tùy chỉnh theo yêu cầu của người dùng.
4. Hiệu suất kỹ thuật (Bảng 2, Bảng 3)
Bảng 3 Đặc tính điện
Đặc trưng HSDC / HRDC2742 Tiêu chuẩn quân sự doanh nghiệp (Q / HW30859-2006) HSDC / HRDC2754 Tiêu chuẩn quân sự doanh nghiệp (Q / HW30832-2006) Đơn vị Nhận xét
Hiệu suất chuyển đổi Sự chính xác ± 8,5 ± 5,3 Phút góc
Theo dõi tốc độ 25 (phút) 12 phút) rps Ở kích thích 400Hz
Nghị quyết 12 14 chút
Tín hiệu và tần số tham chiếu 50 ~ 2600 50 ~ 2600 Hz Không bắt buộc*
Tín hiệu điện áp đầu vào 11,8, 26, 90 11,8, 26, 90 V Không bắt buộc**
Điện áp đầu vào tham chiếu 11,8, 26, 115 11,8, 26, 115 V Không bắt buộc**
Bước đáp ứng 100 150 ms
Gia tốc không đổi 82000 39000 s-2
Sự tiêu thụ năng lượng 0,86 tối đa 1,3 tối đa W
Độ rộng xung bận 1max 1max µs
Công suất tải đầu ra kỹ thuật số 2 tối đa 2 tối đa TTL
Lưu ý: * Đối với bộ chuyển đổi có tần số hoạt động khác như 50Hz, 2kHz, v.v., các thông số động của nó khác nhau, có thể được cung cấp tùy theo nhu cầu của người dùng;
** cho biết nó có thể được tùy chỉnh theo yêu cầu của người dùng.
5. Nguyên tắc hoạt động (Hình 2)
Tín hiệu đầu vào đồng bộ (hoặc tín hiệu đầu vào của bộ phân giải) được chuyển đổi thành tín hiệu trực giao thông qua cách ly vi phân nội bộ:
V1 u003d KE0sinθ sinωt , V2 u003d KE0cosθ sinωt
Trong đó, θ là góc đầu vào mô phỏng.
Hai tín hiệu này và góc kỹ thuật số φ của bộ đếm thuận nghịch bên trong được nhân với hệ số nhân của hàm sin và côsin và được xử lý lỗi:
KE0sinθ cosφ sinωt-KE0cosθ sinφ sinωt u003d KE0sin (θ-φ) sinωt
Các tín hiệu được gửi đến bộ dao động điều khiển điện áp sau khi khuếch đại, phân biệt pha, lọc tích hợp, nếu θ-φ ≠ 0, bộ dao động điều khiển điện áp thay đổi dữ liệu trong bộ đếm thuận nghịch với các xung đầu ra cho đến khi θ-φ trở thành 0 trong độ chính xác của bộ chuyển đổi, trong quá trình này, bộ chuyển đổi luôn theo dõi sự thay đổi của góc đầu vào θ.
Hình 2 Sơ đồ khối cho nguyên tắc hoạt động
Chức năng chuyển của bộ chuyển đổi
Chức năng vòng kín
Phương thức truyền dữ liệu và trình tự thời gian
Có hai phương pháp để đọc dữ liệu hiệu quả trong bộ chuyển đổi: đọc đồng bộ và đọc không đồng bộ.
(1) Chế độ cấm (đọc đồng bộ):
A: bộ chuyển đổi được kết nối với bus 16 bit. Bysel được kết nối với logic “1”.
được đặt thành logic “0” từ logic “1” (khóa dữ liệu), đợi 1μs; được đặt thành logic “0”, chốt bên trong bộ chuyển đổi cho phép xuất dữ liệu; đọc dữ liệu 12 bit hoặc 14 bit; đặt Inhib thành logic “1” để sẵn sàng đọc dữ liệu hợp lệ tiếp theo (xem biểu đồ trình tự thời gian cho truyền 16 bit).
B: bộ chuyển đổi được kết nối với bus 8 bit, bit D1 ~ D8 được kết nối với bus dữ liệu và phần còn lại trống.
được đặt thành logic “0” từ logic “1” (khóa dữ liệu), đợi 1μs; được đặt thành logic “0”, dữ liệu chốt bên trong bộ chuyển đổi cho phép đầu ra; nếu Byse1 được đặt thành logic “1”, bộ chuyển đổi trực tiếp đọc dữ liệu 8 bit cao hơn, nếu Byse1 được đặt thành logic “0”, bộ chuyển đổi đọc các bit còn lại, tự động thêm số 0 cho các bit chưa hoàn chỉnh; đặt thành logic “1” để sẵn sàng đọc dữ liệu hợp lệ tiếp theo (xem Hình 3 và Hình 4 cho chuỗi thời gian truyền 8 bit).
Hình 3 Biểu đồ trình tự thời gian của truyền bus 16 bit
Hình 4 Biểu đồ trình tự thời gian của truyền bus 8 bit
(2) Chế độ bận (đọc không đồng bộ)
Ở chế độ đọc không đồng bộ, được đặt thành logic “1” hoặc bị bỏ trống, vòng lặp bên trong có ở trạng thái ổn định hay không hoặc dữ liệu đầu ra có hợp lệ hay không sẽ được xác định thông qua trạng thái của tín hiệu Bận. Khi tín hiệu Busy ở mức cao, nó cho biết dữ liệu đang được chuyển đổi và dữ liệu tại thời điểm này là dữ liệu không ổn định và không hợp lệ; khi tín hiệu Busy ở mức thấp, nó cho biết quá trình chuyển đổi dữ liệu đã hoàn tất, dữ liệu tại thời điểm này ổn định và hợp lệ và có thể được đọc ra. Khi mức cao xảy ra ở chế độ Bận trong khi đọc, việc đọc thời gian này không hợp lệ. Trong chế độ đọc không đồng bộ, đầu ra Busy là tập xung của mức TTL, độ rộng giữa liên quan đến tốc độ quay. Tương tự như vậy, cũng có hai phương pháp sử dụng là bus 8 bit và bus 16 bit, trong trường hợp đầu ra dữ liệu hợp lệ, việc đọc dữ liệu cũng được kiểm soát bởi, hãy tham khảo biểu đồ trình tự thời gian để truyền dữ liệu (Hình 5 và Hình 6)
Hình 5 Biểu đồ trình tự thời gian cho truyền bus 16 bit
Hình 6 Biểu đồ trình tự thời gian cho truyền bus 8 bit
6. Đường cong MTBF (Hình 7)
Hình 7 Đường cong nhiệt độ MTBF 7. Ký hiệu chân (Hình 8, Bảng 3)
Hình 8 Ghim (Hình dưới)
(Lưu ý: theo GJB / Z299B-98, dự kiến tình trạng mặt đất tốt)
Bảng 3 Ký hiệu chân
Ghim Biểu tượng Hàm số Ghim Biểu tượng Hàm số
1 ~ 14 D1 ~ D14 Đầu ra kỹ thuật số 24 Bysel Chọn bit
15 RLo Đầu vào tín hiệu kích thích 25 NC Để lại không kết nối
16 RHi Đầu vào tín hiệu kích thích 26 Kiểm tra dữ liệu
17 S4 Đầu vào tín hiệu 27 Bận Đầu ra xung bận
18 S3 Đầu vào tín hiệu 28 Kiểm soát chốt dữ liệu
19 S2 Đầu vào tín hiệu 29 + 15V Quyền lực
20 S1 Đầu vào tín hiệu 30 GND Tiếp đất
21 NC Để lại không kết nối 31 -15V Quyền lực
22 Vel Đầu ra điện áp vận tốc 32 + 5V Quyền lực
23 Trường hợp Đất trường hợp
Lưu ý: ① Đối với bộ chuyển đổi 12 bit, không kết nối chân 13 và 14.
② Đối với bộ chuyển đổi SDC, không kết nối chân 17.
③ Nguồn điện: ± 15V, + 5V, GND, nguồn điện không được kết nối ngược lại, nếu không, thiết bị sẽ bị hỏng.
④ Đầu ra kỹ thuật số nhị phân: nó được chia thành đầu ra 12 bit và 14 bit.
⑤ RHi, RLo: đầu vào tín hiệu kích từ.
⑥ S1, S2, S3, S4: đầu vào tín hiệu của bộ phân giải / đồng bộ hóa (S4 không được kết nối để đồng bộ hóa).
⑦ Busy: Báo hiệu bận
Tín hiệu này cho biết đầu ra số nhị phân từ bộ chuyển đổi có hợp lệ hay không. Khi Busy ở mức cao, nó cho biết bộ chuyển đổi đang thực hiện chuyển đổi dữ liệu, dữ liệu xuất ra lúc này không hợp lệ; khi Busy ở mức thấp, dữ liệu trong bộ chuyển đổi đã ổn định và đầu ra dữ liệu tại thời điểm này là hợp lệ.
⑧ Gating dữ liệu
Chân này là chân đầu vào của logic điều khiển, chức năng của nó là xuất dữ liệu tới bộ chuyển đổi để thực hiện điều khiển ba trạng thái. Mức thấp là hợp lệ, dữ liệu đầu ra của bộ chuyển đổi chiếm bus dữ liệu. Khi ở mức cao, chân đầu ra dữ liệu của bộ chuyển đổi ở ba trạng thái, thiết bị không chiếm bus.
⑨ Điều khiển khóa dữ liệu (Cấm tín hiệu)
Chân này là chân đầu vào của logic điều khiển, chức năng của nó là xuất dữ liệu ra bên ngoài cho bộ chuyển đổi để nhận ra điều khiển chốt hoặc bỏ qua tùy chọn.
Ở mức cao, dữ liệu đầu ra của bộ chuyển đổi xuất trực tiếp mà không cần chốt; ở mức thấp, dữ liệu đầu ra của bộ chuyển đổi được chốt, dữ liệu không được cập nhật, nhưng vòng lặp nội bộ không bị gián đoạn và theo dõi hoạt động mọi lúc. đã kết nối điện trở kéo lên bên trong bộ chuyển đổi (liệu thiết bị có sử dụng bus dữ liệu hay không, tức là khi nó xuất dữ liệu phụ thuộc vào trạng thái của).
⑩ Byse1: kết thúc lựa chọn bit
Đây là một đầu điều khiển được thiết kế đặc biệt để kết nối bộ chuyển đổi với dữ liệu 8 bit hoặc 16 bit dữ liệu. Khi bộ chuyển đổi được kết nối với bus dữ liệu 16 bit, Byse1 được kéo lên bên trong, bộ chuyển đổi có thể xuất trực tiếp dữ liệu 12 bit hoặc 14 bit; khi bộ chuyển đổi được kết nối với bus dữ liệu 8 bit, Byse1 ở mức cao, bộ chuyển đổi xuất dữ liệu 8 bit cao hơn (D1 ~ D8), khi Byse1 ở mức thấp, bộ chuyển đổi xuất dữ liệu của các bit còn lại (sao chép dữ liệu của các bit còn lại đến bit D1 ~ D8), và tự động điền số 0 cho dữ liệu của các bit ngắn. Cần lưu ý rằng chỉ cần kết nối D1 ~ D8 khi bộ chuyển đổi được kết nối với bus dữ liệu 8 bit, các chân dữ liệu khác không được kết nối.
8. Bảng giá trị khối lượng (Bảng 4)
Bảng 4 Bảng giá trị khối lượng
Chút Góc Chút Góc Chút Góc
1 (MSB) 180.0000 6 5.6250 11 0,1758
2 90.0000 7 2,8125 12 (đối với LSB 12-bit) 0,0879
3 45.0000 8 1.4063 13 0,0439
4 22.5000 9 0,7031 14 (cho LSB 14-bit) 0,0220
5 11.2500 10 0,3516
9. Sơ đồ kết nối cho ứng dụng điển hình (Hình 9)
Bên cạnh việc được sử dụng trực tiếp để đo chính xác góc quay của bộ phân giải hoặc đồng bộ hóa, bộ chuyển đổi góc trục cũng có thể tạo thành hệ thống đo hai tốc độ hoặc hệ thống điều khiển đo lường kỹ thuật số khác có độ chính xác cao hơn. Hình 9 là một ví dụ về hệ thống hai tốc độ bao gồm bộ chuyển đổi. Hệ thống hai tốc độ được thiết lập trên nguyên tắc kết hợp giữa phép đo thô và chính xác có độ chính xác chuyển đổi cao hơn, Hình 9 cho thấy hệ thống chuyển đổi hai tốc độ bao gồm hai đồng bộ (hoặc bộ phân giải) được ghép nối thông qua hộp số, hai bộ chuyển đổi SDC và một bộ xử lý hai tốc độ HTSL19, đầu ra của nó đạt 19 bit.
Hình 9 Ứng dụng của hệ thống hai tốc độ của SDC
10. Thông số kỹ thuật gói (đơn vị: mm) (Hình 10)
Hình 10 Đặc điểm kỹ thuật gói
Bảng 5 Vật liệu vỏ
Mô hình trường hợp Tiêu đề Tiêu đề mạ Che Bao phủ mạ Chất liệu ghim Mạ pin Phong cách niêm phong Nhận xét
UP4529- 32a Kovar (4J29) Au Hợp kim Fe-Ni (4J42) Au Kovar (4J29) Au Bao bì phù hợp Lớp phủ của chân 23 là Au
Lưu ý: nhiệt độ của chân hàn không được vượt quá 300 ℃ trong vòng 10 giây.
11. Phím đánh số bộ phận (Hình 11)
Hình 11 Phím đánh số bộ phận
Lưu ý: khi điện áp tín hiệu ở trên và điện áp chuẩn (Z) không phải là tiêu chuẩn, chúng sẽ được cung cấp như sau:
(ví dụ: điện áp tham chiếu 5V và điện áp tín hiệu 3V phải được biểu thị bằng -5/3)
Thận trọng khi sử dụng
Cấp nguồn đúng cách, trong quá trình khởi động cần đấu nối chính xác cực âm và cực dương của nguồn điện để tránh tình trạng cháy nguồn.
Kết nối của bộ chuyển đổi
± 15V, + 5V và GND phải được kết nối với các chân tương ứng trên bộ chuyển đổi, lưu ý rằng các cực của nguồn điện phải đúng, nếu không, bộ chuyển đổi có thể bị hỏng. Bạn nên kết nối điện dung bỏ qua 0,1μF và 6,8μF song song giữa mỗi đầu nối nguồn điện và mặt đất. Nguồn tín hiệu và nguồn kích thích được phép kết nối với S1, S2, S3 và S4 và kết thúc RHi và RLo trong phạm vi sai số 5%. Chỉ cần kết nối D1 ~ D8 khi bộ chuyển đổi được kết nối với bus dữ liệu 8-bit, các chân dữ liệu khác bị bỏ trống.
Khi bộ chuyển đổi được kết nối với bus dữ liệu 16 bit, tất cả D1 ~ D14 hoặc (D1 ~ D12) sẽ được kết nối.
Đầu vào tín hiệu phải phù hợp với pha của kích từ để chúng có thể được kết nối chính xác với bộ biến đổi, các pha của chúng như sau:
RHi ~ RLo: VRsinωt
Đối với đồng bộ hóa:
Đối với S1 ~ S3: sinθ sinωt
Đối với S3 ~ S2: sin (θ + 120o) sinωt
Đối với S2 ~ S1: sin (θ + 240o) sinωt
Đối với trình phân giải:
Đối với S1 ~ S3: sinθ sinωt
Đối với S2 ~ S4: cosθ sinωt
Lưu ý: không cho phép kết nối tín hiệu đầu vào của RHi, RLo, S1, S2, S3 và S4 với các chân khác vì sợ hư thiết bị.
Trong quá trình lắp ráp, đáy của sản phẩm phải vừa khít với bảng mạch để tránh làm hỏng các chốt và phải bổ sung thêm lớp chống va đập, nếu cần.
Khi người dùng đặt hàng sản phẩm, các chỉ số hiệu suất điện chi tiết phải tham khảo tiêu chuẩn doanh nghiệp có liên quan.
Công cụ chuyển đổi R / D (H2S80)
1. Tính năng (xem Hình 1 để xem bên ngoài và Bảng 1 cho các kiểu máy)
Độ phân giải 10, 12, 14 và 16 bit tùy chọn
Tỷ lệ theo dõi: tối đa 1040 r / giây
Thông số động: do người dùng thiết kế
Trở kháng đầu vào cao, đầu ra chốt ba trạng thái
Gói DDIP kín bằng kim loại có khả năng chống sương mù muối 40 dây
Tương thích với dòng ADC2S80 của công ty AD của Mỹ
Kích thước: 53 × 20 × 5,3mm2
Trọng lượng: 18g
Hình 1 Hình ảnh bên ngoài của H2S80 2. Phạm vi áp dụng
Hệ thống servo tên lửa; hệ thống điện tử điều hành bay; hệ thống điều khiển radar; hệ thống định vị tàu biển; giám sát ăng ten; hệ thống điều khiển pháo binh; máy công cụ điều khiển số (CNC); hệ thống robot.
3. Lập dàn ý
Bộ chuyển đổi R / D theo dõi liên tục vòng lặp servo H2S80 loại II được thiết kế và sản xuất bằng cách áp dụng quy trình MCM, thiết bị nhân là chip đặc biệt do công ty chúng tôi phát triển độc lập, cách sắp xếp chân cắm tương thích với sản phẩm AD2S80 của công ty AD Mỹ, 10, 12, Đầu ra chốt dữ liệu nhị phân tự nhiên song song 14 và 16 bit (độ phân giải tùy chọn), gói vỏ kín kim loại DIL 40 dòng, có ưu điểm là độ chính xác cao, tiêu thụ điện năng thấp, khối lượng nhỏ, trọng lượng nhẹ và độ tin cậy cao, v.v. và có thể được sử dụng rộng rãi để điều khiển điện tử hệ thống như máy bay, tàu thủy, pháo binh, tên lửa, radar, xe tăng, v.v. Bảng 1 Các điều kiện định mức và điều kiện vận hành khuyến nghị
Tối đa giá trị đánh giá tuyệt đối Điện áp cung cấp logic VL: 7V
Điện áp cung cấp Vs: ± 13,5V
Điện áp tín hiệu Vi: 2V ± 20%
Điện áp tham chiếu: VRef: 2V ± 20%
Tần số hoạt động f: 50 ~ 20000Hz
Nhiệt độ bảo quản Tstg: 65 ~ 150 ℃
Điều kiện hoạt động được đề xuất Điện áp cung cấp logic VL: 5 ± 0,5V
Điện áp cung cấp Vs: ± 12 ± 0,75V
Điện áp tín hiệu Vi: 2V ± 10%
Điện áp tham chiếu: VRef: 2V ± 10%
Tần số hoạt động f: 50 ~ 20000Hz
Phạm vi nhiệt độ hoạt động (TA): 55 ~ 125 ℃
4. Đặc tính điện (Bảng 1, Bảng 2)
Bảng 2 Đặc tính điện
Đặc trưng H2S80 Đơn vị Đặc trưng H2S80
Tiêu chuẩn quân đội doanh nghiệp (Q / HW30974-2007) Đơn vị
Nghị quyết Tùy chọn 10, 12, 14 và 16-bit
± 21 phút cắt + 1LSB (10 bit) Tín hiệu điện áp 2V ± 10% V
± 8 phút cắt + 1LSB (12 bit) Điện áp tham chiếu 2V ± 10% V
Sự chính xác ± 4 phút + 1LSB (14 bit) chút Mức đầu vào kỹ thuật số Tương thích với TTL
± 2 phút cắt + 1LSB (16 bit)
Theo dõi tốc độ 0 ~ 1040 (10 bit) r / giây Mức đầu ra kỹ thuật số Logic cao ≥3,3
Logic thấp ≤0,7 V
0 ~ 260 (12 bit)
0 ~ 65 (14 bit)
0 ~ 16 (16 bit) Quyền lực +12, 12, +5 V
Dải tần số hoạt động 50 ~ 20000 Hz Sự tiêu thụ năng lượng 450 mW
5. Nguyên tắc hoạt động (Hình 2 và Hình 3)
Tín hiệu đầu vào của bộ đồng bộ hóa (hoặc bộ phân giải) được chuyển đổi thành tín hiệu trực giao thông qua cách ly vi phân bên trong:
Vsin-KE0sin (ωt + α) sinθ (sin)
Vcos-KE0sin (ωt + α) cosθ (cos)
Trong đó, θ là góc đầu vào tương tự.
Hai tín hiệu này và góc kỹ thuật số φ của bộ đếm thuận nghịch bên trong được nhân với hệ số nhân của hàm sin và côsin và được xử lý lỗi:
KE0sin (ωt + α) (sinθ cosφ -cosθ sinφ)
tức là KE0sin (ωt + α) sin (θ-φ)
Nó được gửi đến bộ dao động được điều khiển bằng điện áp sau khi khuếch đại, phân biệt pha và lọc tích hợp, nếu θ-φ ≠ 0, bộ dao động được điều khiển bằng điện áp sẽ xuất ra các xung và bộ đếm thuận nghịch sẽ đếm chúng cho đến khi θ-φ trở thành 0 trong độ chính xác của bộ chuyển đổi. Trong quá trình này, bộ chuyển đổi luôn theo dõi sự thay đổi của góc đầu vào.
Hình 2 Sơ đồ khối cho nguyên tắc hoạt động
Chế độ đọc:
Có hai phương pháp sau để truyền dữ liệu:
(1) chế độ
Sau 640ns mức logic thấp, dữ liệu đầu ra là hợp lệ và bộ chuyển đổi nhận ra việc truyền dữ liệu thông qua Enable. Sau khi phát hành In ức chế, hệ thống sẽ tự động tạo ra một xung có độ rộng bằng xung Busy để cập nhật dữ liệu.
(2) Chế độ bán thân:
Tại cạnh lên của xung Busy, bộ đếm có thể đảo ngược ba trạng thái sẽ đếm; ở cạnh giảm dần của xung Busy, bên trong nó tạo ra một xung chốt với độ rộng của nó bằng xung Busy để cập nhật dữ liệu của chốt ba trạng thái, trình tự thời gian truyền dữ liệu được thể hiện trong Hình 3, nói cách khác , sau 600ns mức logic Bận ở mức thấp, việc truyền dữ liệu ổn định là hợp lệ. Trong quá trình đọc, khi mức cao xảy ra trong Bận, việc đọc thời gian này không hợp lệ. Trong chế độ đọc không đồng bộ, đầu ra Busy là tập xung của mức CMOS, độ rộng xung liên quan đến tốc độ quay.
Hình 3 Biểu đồ trình tự thời gian để đọc bus
6. Đường cong MTBF (Hình 4)
Hình 4 Đường cong nhiệt độ MTBF 7. Ký hiệu chân (Hình 5, Bảng 3)
Hình 5 Ghim (Hình dưới)
(Lưu ý: theo GJB / Z299B-98, dự kiến tình trạng mặt đất tốt)
Bảng 3 Ký hiệu chân
Ghim Biểu tượng Hàm số Ghim Biểu tượng Hàm số Ghim Biểu tượng Hàm số
1 Tham khảo / I Đầu vào tín hiệu tham chiếu 15 D7 Đầu ra kỹ thuật số 7 29 DG Mặt đất kỹ thuật số ⑧
2 Demo / I Đầu vào bộ phân biệt 16 D8 Đầu ra kỹ thuật số 8 30 SC1 Đầu vào chọn độ phân giải ①
3 Acer / O Đầu vào lỗi AC 17 D9 Đầu ra kỹ thuật số 9 31 SC2
4 cos Đầu vào tín hiệu cosine 18 D10 Đầu ra kỹ thuật số 10 32 NC Để lại không kết nối
5 AG Mặt đất tương tự ⑧ 19 D11 Đầu ra kỹ thuật số 11 33 Bận Đầu ra tín hiệu bận ④
6 SG Tín hiệu mặt đất ⑧ 20 D12 Đầu ra kỹ thuật số 12 34 Chiều hướng Đếm đầu ra tín hiệu hướng ⑤
7 tội Đầu vào tín hiệu sin 21 D13 Đầu ra kỹ thuật số 13 35 Ripclk Ngõ ra tín hiệu 0-bit ⑥
8 + VS + Nguồn 12V ⑦ 22 D14 Đầu ra kỹ thuật số 14 36 -VS -12V điện ⑦
9 D1 Đầu ra kỹ thuật số 1 (MSB) 23 D15 Đầu ra kỹ thuật số 15 37 Vco / I Đầu vào dao động điều khiển điện áp
10 D2 Đầu ra kỹ thuật số 2 24 D16 Đầu ra kỹ thuật số bit 16 (LSB) 38 Inte / I Đầu vào của trình tích hợp
11 D3 Đầu ra kỹ thuật số 3 25 + VL + Nguồn 5V ⑦ 39 Inte / O Đầu ra tích hợp
12 D4 Đầu ra kỹ thuật số 4 26 Bật đầu vào tín hiệu ② 40 Demo / O Đầu ra bộ phân biệt
13① D5 Đầu ra kỹ thuật số 5 27 NC Để lại không kết nối
14① D6 Đầu ra kỹ thuật số 6 28 Đầu vào tín hiệu tĩnh ③
Lưu ý: ① SC1 và SC2 cho đầu vào lựa chọn độ phân giải, đã được kết nối với điện trở kéo lên bên trong.
Nghị quyết SC1 SC2
10 0 0
12 0 1
14 1 0
16 1 1
② kích hoạt đầu vào tín hiệu, chân này là chân đầu vào logic của điều khiển gating dữ liệu, chức năng của nó là thực hiện điều khiển ba trạng thái bên ngoài trên dữ liệu đầu ra của bộ chuyển đổi. Mức thấp là hợp lệ, dữ liệu đầu ra của bộ chuyển đổi chiếm bus dữ liệu. Khi ở mức cao, chân xuất dữ liệu của bộ chuyển đổi xuất hiện ở trạng thái trở kháng cao, thiết bị không chiếm bus. Thời gian trễ kích hoạt và phát hành là 600ns (tối đa).
③ đầu vào tín hiệu tĩnh, chân này là chân đầu vào của logic điều khiển chốt dữ liệu, chức năng của nó là thực hiện điều khiển chốt hoặc bỏ qua lựa chọn dữ liệu đầu ra của bộ chuyển đổi. Ở mức cao, dữ liệu đầu ra của bộ chuyển đổi được xuất trực tiếp mà không cần chốt; ở mức thấp, dữ liệu đầu ra của bộ chuyển đổi được chốt, dữ liệu không được cập nhật, nhưng vòng lặp nội bộ không bị gián đoạn và theo dõi hoạt động mọi lúc, đã được kết nối với kháng kéo lên bên trong. Sau 600ns (tối đa) độ trễ của cạnh giảm dần của tín hiệu tĩnh, dữ liệu trở nên ổn định (cho dù thiết bị có chiếm bus dữ liệu hay không, tức là khi nào nó xuất dữ liệu phụ thuộc vào trạng thái Bật).
④ Đầu ra tín hiệu “Bận”, tín hiệu này cho biết đầu ra mã nhị phân của bộ chuyển đổi có hợp lệ hay không. Khi Busy ở mức cao, nó cho biết bộ chuyển đổi đang thực hiện chuyển đổi dữ liệu, dữ liệu xuất ra lúc này không hợp lệ; khi Busy ở mức thấp chứng tỏ dữ liệu trong bộ chuyển đổi đã ổn định và dữ liệu xuất ra lúc này là hợp lệ, độ rộng xung là 400ns.
⑤ Hướng: đầu ra tín hiệu hướng đếm, mức cao cho biết bộ chuyển đổi đang thêm số đếm và mức thấp cho biết bộ chuyển đổi đang trừ số đếm.
⑥ RIPCLK: Đầu ra tín hiệu không: khi dữ liệu đầu ra tăng từ tất cả “1” đến tất cả “0” hoặc dữ liệu đầu ra giảm từ tất cả “0” xuống tất cả “1”, đầu ra là xung dương, độ rộng xung là 200μs .
⑦ Sức mạnh: + VS
+ Nguồn 12V
12mA
-VS -12V điện 18mA
+ VL Nguồn + 5V 10mA
⑧ Nối đất: Nối đất tương tự AG và mặt đất kỹ thuật số DG cần được kết nối bên ngoài với mặt đất nguồn.
8. Sơ đồ kết nối cho ứng dụng điển hình (Hình 6)
Hình 6 Sơ đồ kết nối cho ứng dụng điển hình
(1) Cài đặt bộ lọc
15kΩ≤R1 u003d R2≤56kΩ
C1 u003d C2 u003d (Đơn vị R1: Ω; fRef là tần số của tín hiệu nguồn kích thích, đơn vị: Hz)
(2) Thiết lập mức tăng
R4 u003d
EDC u003d 160 × 10-3
u003d 40 × 10-3
u003d 10 × 10-3
u003d 2,5 × 10-3 (Độ phân giải 10-bit)
(Độ phân giải 12-bit)
(Độ phân giải 14-bit)
(Độ phân giải 16-bit)
(3) Đầu vào tín hiệu tham chiếu
R3 u003d 100kΩ
C3 >
(4) Cài đặt giá trị tối đa tỷ lệ theo dõi
T là giá trị tối đa. tốc độ theo dõi (đơn vị: r / giây), nhưng không được vượt quá 1/16 tần số tham chiếu. Để làm cho sản phẩm ở mức tối đa. tỷ lệ theo dõi và điện áp vận tốc góc đạt 8V, nó được yêu cầu:
R6 u003d
p u003d 1024
u003d 4096
u003d 16384
u003d 65536 (Độ phân giải 10-bit)
(Độ phân giải 12-bit)
(Độ phân giải 14-bit)
(Độ phân giải 16-bit) Bảng 4 Thiết lập tỷ lệ theo dõi
Nghị quyết Tỷ lệ giữa tần số tham chiếu với tần số băng thông fBW
10 2,5 : 1
12 4 : 1
14 6 : 1
16 7,5 : 1
(5) Cài đặt vòng lặp chọn băng thông
Tỷ lệ tần số chuẩn đã chọn so với tần số băng thông của sản phẩm không được nhỏ hơn quy định trong Bảng 4.
Ví dụ: chọn 50Hz cho độ phân giải 14-bit và tần số tham chiếu 400Hz của sản phẩm.
C4 u003d (đơn vị của R6: kΩ)
C5 u003d 5 × C4
R5 u003d
(6) Cài đặt bộ lọc VCo
C6 u003d 470pF , R7 u003d 68Ω
(7) Cài đặt 0
Để loại bỏ độ lệch không của sản phẩm, nó có thể được điều chỉnh bằng cách sử dụng chiết áp R9, phương pháp là: ngắn mạch chân 4 và 1 của sản phẩm, ngắn mạch chân 7 và 6 (tương đương với góc đầu vào 0o), điều chỉnh chiết áp R9 để làm cho tất cả dữ liệu đầu ra của sản phẩm bằng không.
Đối với nguồn điện được kết nối với chân + VS và -VS, điện áp của nó phải là ± 12V và không được kết nối ngược lại. Nguồn logic kỹ thuật số VL được kết nối với vị trí của + 5V. Giữa nguồn điện và đất nên mắc song song tụ điện sứ 0,1µF và tụ điện điện tích 6,8µF.
9. Quy cách đóng gói (đơn vị: mm) (Hình 7, Bảng 5 và 6)
Hình 7 Hình ảnh bên ngoài và kích thước của gói hàng Bảng 5 Đặc điểm kỹ thuật gói
Biểu tượng Giá trị
Tối thiểu. Trên danh nghĩa Tối đa
A 5.5
Φb 0,35 0,55
D 53,8
E 20.0
e 2,54
e1 15,24
L 5
Bảng 6 Vật liệu vỏ
Mô hình trường hợp Tiêu đề Tiêu đề mạ Che Bao phủ mạ Chất liệu ghim Mạ pin Phong cách niêm phong Nhận xét
LÊN5320- 40 4J42 Lớp phủ Ni 4J42 Lớp phủ Ni hóa học 4J42 Lớp phủ Au Bao bì phù hợp Đế cộng với ba hạt thủy tinh rắn
Lưu ý: nhiệt độ của chân hàn không được vượt quá 300 ℃ trong vòng 10 giây.
10. Phím đánh số bộ phận (Hình 8)
Hình 8 Phím đánh số bộ phận
Thận trọng khi sử dụng
Cấp nguồn đúng cách, trong quá trình khởi động cần đấu nối chính xác cực âm và cực dương của nguồn điện để tránh tình trạng cháy nguồn.
Trong quá trình lắp ráp, đáy của sản phẩm phải vừa khít với bảng mạch để tránh làm hỏng các chốt và phải bổ sung thêm lớp chống va đập, nếu cần.
Không uốn cong các sơ đồ chân để tránh làm vỡ chất cách điện, ảnh hưởng đến tính chất làm kín.
Khi người dùng đặt hàng sản phẩm, các chỉ số hiệu suất điện chi tiết phải tham khảo tiêu chuẩn doanh nghiệp có liên quan.
Synchro / Resolver to Digital Converter
(Dòng HSDC / HRDC1459)
1. Tính năng (xem Hình 1 để xem bên ngoài và Bảng 1 cho các kiểu máy)
Chuyển đổi cách ly vi sai bên trong
Độ phân giải 16-bit
Độ chính xác: 2 phút góc
Đầu ra chốt ba trạng thái
Tốc độ theo dõi liên tục cao
Gói DDIP kín bằng kim loại chống sương mù 36 dây
Pin-To-Pin tương thích với Model SDC14560 của công ty DDC
Kích thước: 48,2 × 20 × 5,3mm3; trọng lượng: 17g
Hình 1 Hình ảnh bên ngoài của sê-ri HSDC / HRDC1459
2. Phạm vi áp dụng
Hệ thống điều khiển servo quân sự; giám sát ăng ten; hệ thống điều khiển radar; hệ thống định vị cho tàu hải quân; hệ thống điều khiển pháo; hệ thống thiết bị bay; hệ thống điện tử hàng không; máy vi tính điều khiển số (CNC); công nghệ rô bốt.
3. Lập dàn ý
Bộ chuyển đổi đồng bộ hóa / phân giải sê-ri HSDC / HRDC1459 là một thiết bị chuyển đổi tích hợp kết hợp để theo dõi liên tục được thiết kế trên nguyên tắc của servo kiểu II. Dòng sản phẩm này được thiết kế và sản xuất theo quy trình MCM, các phần tử cốt lõi sử dụng chip đặc biệt do viện của chúng tôi phát triển độc lập. Sự sắp xếp chân cắm tương thích với các sản phẩm dòng SDC14560 của công ty DDC của Mỹ, đầu ra chốt dữ liệu mã nhị phân tự nhiên 16 bit song song, gói kim loại hoàn toàn kín DIP 36 dây, có ưu điểm là độ chính xác cao, khối lượng nhỏ, tiêu thụ điện năng thấp, trọng lượng nhẹ và độ tin cậy cao, v.v., và có thể được sử dụng rộng rãi trong các vũ khí chiến lược và chiến thuật quan trọng như máy bay, tàu hải quân, pháo, tên lửa, radar, xe tăng, v.v.
4. Hiệu suất điện (Bảng 1, Bảng 2)
Tối đa giá trị đánh giá tuyệt đối Điện áp cung cấp logic VL: + 7V
Điện áp cung cấp Vs: ± 17,5V
Điện áp tín hiệu Vi: giá trị định mức ± 20%
Điện áp tham chiếu VRef: giá trị danh định ± 20%
Tần số hoạt động f: giá trị định mức ± 20%
Nhiệt độ bảo quản Tstg: -65 ~ 150 ℃
Điều kiện hoạt động được đề xuất Điện áp cung cấp logic VL: 5 ± 0,5V
Điện áp cung cấp Vs: ¡À15¡À0.75V
Điện áp tín hiệu Vi: giá trị định mức ± 10%
Điện áp tham chiếu VRef: giá trị danh định ± 10%
Tần số hoạt động f *: giá trị định mức ± 10%
Phạm vi nhiệt độ hoạt động (TA): -55 ~ 125 ℃
Lưu ý: * cho biết nó có thể được tùy chỉnh theo yêu cầu của người dùng.
Bảng 2 Đặc tính điện
Đặc trưng Điều kiện
(VS u003d ± 15V, VL u003d + 5V) Dòng HSDC14569
Tiêu chuẩn quân sự (Q / HW20725-2006)
Tối thiểu. Tối đa
Nghị quyết Mã kỹ thuật số song song nhị phân 16-bit
Sự chính xác ± 10% điện áp tín hiệu, điện áp tham chiếu và phạm vi dao động của tần số hoạt động -2 phút góc +2 phút góc
Dải tần số tham chiếu 50Hz 2600Hz
Dải điện áp tham chiếu 2V 115V
Trở kháng đầu vào tham chiếu 4,4kΩ 129,2kΩ
Dải điện áp tín hiệu 2V 90V
Trở kháng đầu vào tín hiệu 4,4kΩ 102,2kΩ
Chuyển pha tín hiệu / tham chiếu -70o + 70o
Mức logic đầu vào Logic “1” ≥3.3V Logic “0” ≤0,8V
đầu vào 0 0,8V
đầu vào 0 0,8V
đầu vào 0 0,8V
Mức logic đầu ra Logic “1” ≥3.3V Logic “0” ≤0,8V
Đầu ra mã góc kỹ thuật số Logic “1” ≥3.3V Logic “0” ≤0,8V
Chuyển đổi đầu ra tín hiệu bận (CB) 200ns 600ns
Đầu ra bit phát hiện lỗi Logic “0” chỉ ra lỗi
Công suất tải 3TTL
Theo dõi tốc độ 2,5 vòng / giây
Gia tốc không đổi 12500
Cài đặt thời gian 850ms
Đầu ra điện áp vận tốc góc (Vel) -10V + 10V
Hiện hành Vs u003d + 15V 10mA
Vs u003d -15V 15mA
VL u003d + 5V 20mA
5. Bước phản hồi
Khi một bước trong tín hiệu đầu vào hoặc lần bật nguồn ban đầu xảy ra, phản hồi sẽ bị hạn chế do giới hạn tốc độ theo dõi tối đa. Quá trình dao động của góc kỹ thuật số đầu ra được thể hiện trong Hình 2:
Hình 2 Đường cong của phản ứng bước
6. Nguyên tắc hoạt động (Hình 3)
Tín hiệu đầu vào của bộ đồng bộ hóa (hoặc bộ phân giải) được chuyển đổi thành tín hiệu trực giao thông qua cách ly vi phân bên trong:
Vsin u003d KE0sin (ωt + α) sinθ (sin)
Vcos u003d KE0sin (ωt + α) cosθ (cos)
Trong đó, θ là góc đầu vào tương tự.
Hai tín hiệu này và góc kỹ thuật số φ của bộ đếm thuận nghịch bên trong được nhân với hệ số nhân của hàm sin và côsin và được xử lý lỗi:
KE0sin (ωt + α) (sinθ cosφ -cosθ sinφ) 即 KE0sin (ωt + α) sin (θ-φ)
Tín hiệu này được gửi đến bộ dao động điều khiển bằng điện áp sau khi khuếch đại, phân biệt pha, lọc tích hợp. Nếu θ-φ ≠ 0, bộ dao động điều khiển bằng điện áp sẽ xuất ra các xung và bộ đếm thuận nghịch sẽ đếm chúng cho đến khi θ-φ u003d 0 trong độ chính xác của bộ chuyển đổi. Trong quá trình này, bộ chuyển đổi luôn theo dõi sự thay đổi của góc đầu vào.
Chế độ đọc:
Có hai phương pháp sau để truyền dữ liệu:
(1) chế độ
Sau 640ns mức logic thấp, dữ liệu đầu ra là hợp lệ và bộ chuyển đổi nhận ra việc truyền dữ liệu qua và. Sau khi phát hành In ức chế, hệ thống sẽ tự động tạo ra một xung có độ rộng bằng xung Busy để cập nhật dữ liệu.
(2) Chế độ bán thân:
Tại cạnh lên của xung Busy, bộ đếm có thể đảo ngược ba trạng thái sẽ đếm; ở cạnh giảm dần của xung Busy, bên trong nó tạo ra một xung chốt với độ rộng của nó bằng xung Busy để cập nhật dữ liệu của chốt ba trạng thái, trình tự thời gian của quá trình truyền dữ liệu được thể hiện trong Hình 4, nói cách khác , sau 600ns mức logic Bận ở mức thấp, việc truyền dữ liệu ổn định là hợp lệ. Trong chế độ đọc không đồng bộ, đầu ra Busy là một chuỗi xung ở mức CMOS, độ rộng của mức cao và thấp của nó phụ thuộc vào tần số hoạt động và tốc độ quay của thiết bị được chọn.
Hình 3 Sơ đồ khối nguyên lý hoạt động
Hình 4 Trình tự thời gian truyền dữ liệu
7. Đường cong MTBF (Hình 5)
Hình 5 Đường cong nhiệt độ MTBF 8. Ký hiệu chân (Hình 6, Bảng 3)
Hình 6 Ghim (Hình dưới)
(Lưu ý: theo GJB / Z299B-98, dự kiến tình trạng mặt đất tốt)
Bảng 3 Ký hiệu chân
Ghim Biểu tượng Nghĩa Ghim Biểu tượng Nghĩa
1 S1 Đầu vào bộ phân giải S1 (hoặc đầu vào đồng bộ S1) 25 Cho phép kiểm soát các chữ số 8 bit thấp
2 S2 Đầu vào bộ phân giải S2 (hoặc đầu vào đồng bộ hóa S2) 26 Cho phép kiểm soát các chữ số 8 bit cao
3 S3 Đầu vào bộ phân giải S3 (hoặc đầu vào đồng bộ hóa S3) 27 RIPCLK Ngõ ra tín hiệu 0-bit
4 S4 Đầu vào bộ phân giải S4 (không kết nối) 28 VL Nguồn + 5V
5 ~ 18 D1 ~ D14 Đầu ra kỹ thuật số 1 (MSB) -14 29 GND Đất
19 RHi Đầu vào tín hiệu tham chiếu cao cấp 30 NC Bỏ trống
20 RLo Kết thúc thấp của đầu vào tín hiệu tham chiếu 31 -Vs -15V điện
21 D15 Đầu ra kỹ thuật số 15 32 -15V + Nguồn 15V
22 D16 Đầu ra kỹ thuật số 16 (LSB) 33 Đầu vào tín hiệu tĩnh
23 Vel Đầu ra tín hiệu điện áp vận tốc góc 34 Đầu ra bit phát hiện lỗi
24 GB Đầu ra tín hiệu bận 36-36 NC Bỏ trống
Ghi chú: D1 ~ D16 Hệ thống nhị phân song song đầu ra mã góc kỹ thuật số
S1, S2, S3, S4 Đầu vào tín hiệu của bộ phân giải (hoặc đồng bộ hóa)
RHi Đầu vào tín hiệu tham chiếu cao cấp
RLo Kết thúc thấp của đầu vào tín hiệu tham chiếu
Đầu vào tín hiệu cho phép chữ số 8 bit thấp hơn, chân này là chân đầu vào logic của điều khiển gating dữ liệu, chức năng của nó là thực hiện điều khiển ba trạng thái bên ngoài trên dữ liệu đầu ra 8 bit thấp hơn của bộ chuyển đổi. Mức thấp là hợp lệ, dữ liệu đầu ra 8 bit thấp của bộ chuyển đổi chiếm bus dữ liệu. Khi ở mức cao, chân đầu ra dữ liệu 8-bit thấp của bộ chuyển đổi xuất hiện ở trạng thái trở kháng cao, thiết bị không chiếm bus. Thời gian trễ kích hoạt và phát hành là 600ns (tối đa).
Đầu vào tín hiệu cho phép số 8 bit cao, chân này là chân đầu vào logic của điều khiển gating dữ liệu, chức năng của nó là thực hiện điều khiển ba trạng thái bên ngoài trên dữ liệu đầu ra 8 bit cao hơn của bộ chuyển đổi. Mức thấp là hợp lệ, dữ liệu đầu ra 8 bit cao của bộ chuyển đổi chiếm bus dữ liệu. Khi ở mức cao, chân đầu ra dữ liệu 8-bit cao của bộ chuyển đổi xuất hiện ở trạng thái trở kháng cao, thiết bị không chiếm bus. Thời gian trễ kích hoạt và phát hành là 600ns (tối đa).
đầu vào tín hiệu tĩnh, chân này là chân đầu vào của logic điều khiển chốt dữ liệu, chức năng của nó là thực hiện điều khiển chốt hoặc bỏ qua lựa chọn dữ liệu đầu ra của bộ chuyển đổi. Ở mức cao, dữ liệu đầu ra của bộ chuyển đổi được xuất trực tiếp mà không cần chốt; ở mức thấp, dữ liệu đầu ra của bộ chuyển đổi được chốt, dữ liệu không được cập nhật, nhưng vòng lặp nội bộ không bị gián đoạn và theo dõi hoạt động mọi lúc, đã được kết nối với kháng kéo lên bên trong. Sau 600ns (tối đa) độ trễ của cạnh giảm dần của tín hiệu tĩnh, dữ liệu trở nên ổn định (liệu thiết bị có chiếm giữ bus dữ liệu hay không, tức là khi nào nó xuất dữ liệu phụ thuộc vào trạng thái của và).
Đầu ra tín hiệu CB “Bận”, tín hiệu này cho biết đầu ra mã nhị phân của bộ chuyển đổi có hợp lệ hay không. Sau khi thay đổi đầu vào góc đạt 0,33 phút góc, đầu cuối CB xuất ra một xung dương có độ rộng 400ns (điển hình), khi CB ở mức cao có nghĩa là bộ chuyển đổi đang chuyển đổi, lúc này, dữ liệu đầu ra không hợp lệ ; sau khi cạnh rơi của tín hiệu CB trì hoãn trong 600ns (tối đa), dữ liệu trở nên ổn định, tại thời điểm này, dữ liệu cập nhật đầu ra là hợp lệ.
Ngõ ra bit phát hiện lỗi, mức cao cho biết bộ chuyển đổi làm việc bình thường, trong trường hợp dây tín hiệu bị đứt hoặc bộ chuyển đổi không theo dõi bình thường, bit này chuyển thành mức thấp từ mức cao.
RIPCLK: Đầu ra tín hiệu không R.C: khi dữ liệu đầu ra tăng từ tất cả “1” đến tất cả “0” hoặc dữ liệu đầu ra giảm từ tất cả “0” xuống tất cả “1”, đầu ra là xung dương, độ rộng xung là 200μs .
VL, VS, VS Nguồn điện sắp kết thúc
GND Đầu đến dây nối đất
Gợi ý:
① Điện áp chân không được vượt quá 20% giá trị danh định.
② Điện áp của nguồn điện không được vượt quá dải quy định.
③ Không kết nối RHi và RLo tham chiếu với các chân khác.
④ Đối với nguồn điện được kết nối với chân + VS và -VS, điện áp của nó phải là ± 15V và không được kết nối ngược lại. Nguồn cung cấp logic kỹ thuật số VL được kết nối với + 5V. Giữa nguồn điện và đất nên mắc song song tụ điện sứ 0,1µF và tụ điện điện tích 6,8µF.
⑤ Các tín hiệu tham chiếu được kết nối với RHi và RLo. Trong trường hợp đồng bộ, các tín hiệu được kết nối với S1, S2 và S3 theo các quy ước sau:
sin (ωt + α) sinθ
sin (ωt + α) sin (θ + 120o)
sin (ωt + α) sin (θ + 240o)
⑥ Trong trường hợp bộ phân giải, các tín hiệu được kết nối với S1, S2, S3 và S4 theo các quy ước sau:
sin (ωt + α) sinθ
sin (ωt + α) cosθ
Các chân của CB, và tất cả sẽ được kết nối như mô tả cho việc truyền dữ liệu ở trên.
9. Bảng giá trị khối lượng (Bảng 4)
Bảng 4 Bảng giá trị khối lượng
Chút Góc / bit Góc góc phút / bit Chút Góc Góc góc phút / bit Chút Góc Góc góc phút / bit
1 (MSB) 180.0000 10800 7 2,8125 168,75 13 0,0439 2,64
2 90.0000 5400 8 1.4063 84,38 14 0,0220 1,32
3 45.0000 2700 9 0,7031 42,19 15 0,0110 0,66
4 22.5000 1350 10 0,3516 21.09 16 (LSB) 0,0055 0,33
5 11.2500 675 11 0,1758 10,55
6 5.6250 387,5 12 0,0879 5,27
10. Sơ đồ kết nối cho ứng dụng điển hình (Hình 7) 11. Thông số kỹ thuật gói (đơn vị: mm) (Hình 8, Bảng 5)
Hình 7 Sơ đồ kết nối cho ứng dụng điển hình
Hình 8 Hình ảnh bên ngoài và kích thước của gói hàng
Bảng 5 Vật liệu vỏ
Mô hình trường hợp Tiêu đề Tiêu đề mạ Che Bao phủ mạ Chất liệu ghim Mạ pin Phong cách niêm phong Nhận xét
LÊN4820- 36A 4J42 Lớp phủ Ni 4J42 Lớp phủ Ni hóa học 4J42 Lớp phủ Au Bao bì phù hợp Đế cộng với ba hạt thủy tinh rắn
12. Phím đánh số bộ phận (Hình 9)
Hình 9 Phím đánh số bộ phận
Lưu ý: khi điện áp tín hiệu ở trên và điện áp chuẩn (Z) không phải là tiêu chuẩn, chúng sẽ được cung cấp như sau:
(ví dụ: điện áp tham chiếu 5V và điện áp tín hiệu 3V được biểu thị bằng 5/3)
Thận trọng khi sử dụng
Cấp nguồn đúng cách, trong quá trình khởi động cần đấu nối chính xác cực âm và cực dương của nguồn điện để tránh tình trạng cháy nguồn.
Trong quá trình lắp ráp, đáy của sản phẩm phải vừa khít với bảng mạch để tránh làm hỏng các chốt và phải bổ sung thêm lớp chống va đập, nếu cần.
Không uốn cong các sơ đồ chân để tránh làm vỡ chất cách điện, ảnh hưởng đến tính chất làm kín.
Khi người dùng đặt hàng sản phẩm, các chỉ số hiệu suất điện chi tiết phải tham khảo tiêu chuẩn doanh nghiệp có liên quan.
Synchro / Resolver to Digital Converter
(Dòng MSDC / MRDC37)
1. Tính năng (xem Hình 1 để xem bên ngoài và Bảng 1 cho các kiểu máy)
Độ chính xác cao
Khối lượng nhỏ
Tốc độ theo dõi cao
Theo dõi không bị gián đoạn trong quá trình truyền dữ liệu
Đầu ra chốt ba trạng thái
Sự tiêu thụ ít điện năng
Kích thước: 50,8 × 50,8 × 10mm2
Trọng lượng: 48g
Hình 1 Hình bên ngoài của dòng MSDC / MDRC37 2. Phạm vi áp dụng
Cơ chế Servo; giám sát ăng ten; hệ thống định vị; điều khiển pháo binh; kiểm soát công nghiệp; hệ thống rô bốt; hệ thống điều khiển radar.
3. Lập dàn ý
Dòng MSDC / MRDC37 là bộ chuyển đổi kỹ thuật số 16 bit sang bộ phân giải / đồng bộ hóa. Tín hiệu đầu vào được chia thành tín hiệu phân giải và kích thích bốn dây hoặc tín hiệu đồng bộ và kích thích ba dây. Tín hiệu đầu ra là mã nhị phân tự nhiên song song được đệm thông qua chốt ba trạng thái và tương thích với mức TTL.
Sản phẩm áp dụng mạch servo bậc 2 với khối lượng nhỏ và trọng lượng nhẹ, người dùng có thể sử dụng rất tiện lợi bằng cách điều khiển các chân tín hiệu.
4. Hiệu suất kỹ thuật (Bảng 1, Bảng 2)
Bảng 1 Các điều kiện định mức và điều kiện vận hành khuyến nghị
Tối đa giá trị đánh giá tuyệt đối Điện áp cung cấp + VS: 12,5 ~ 17,5V
Điện áp cung cấp Vs: 17,25 ~ 12,5V
Điện áp cung cấp logic VL: 7V
Phạm vi nhiệt độ lưu trữ: -40 ~ + 100 ℃
Điều kiện hoạt động được đề xuất Điện áp cung cấp + VS: 15V ± 5%
Điện áp cung cấp Vs: 15V ± 5%
Điện áp logic VL: 5V ± 5%
Điện áp tham chiếu (giá trị hiệu dụng) VRef: giá trị danh định ± 10%
Điện áp tín hiệu (giá trị hiệu dụng) Vi: ± 10% giá trị danh định
Tần số tham chiếu f *: giá trị danh nghĩa ± 10%
Dải nhiệt độ hoạt động TA: 40 ℃ ~ 85 ℃
Lưu ý: * cho biết nó có thể được tùy chỉnh theo yêu cầu của người dùng.
Bảng 2 Đặc tính điện
Đặc trưng Điều kiện
(40 ~ + 85 ℃)
(Trừ khi được quy định khác) (Dòng MSDC / MDRC37)
Đơn vị
Tối thiểu. Tối đa
Độ phân giải / RES 0 ~ 360º 12 16 chút
Tỷ lệ theo dõi / St① 3 36 r / giây
Mức đầu ra cao / VOH TA u003d 25 ℃ 2,4 V
Mức đầu ra thấp / VOL TA u003d 25 ℃ 0,8 V
Công suất tiêu thụ / PD TA u003d 25 ℃ 1,3 W
Vel tuyến tính / ERI TA u003d 25 ℃ 1,0 %
Dải điện áp tham chiếu 2 115 V
Dải điện áp tín hiệu 2 90 V
Dải tần số 30 2600 Hz
Sự chính xác ±3 ± 8,5 Phút góc
Lưu ý: ① tốc độ theo dõi là 3 rps cho độ phân giải 16 bit và 36 rps cho độ phân giải 12 bit; St có thể được thiết kế theo yêu cầu của người dùng.
5. Nguyên tắc hoạt động (Hình 2)
Tín hiệu đầu vào đồng bộ (hoặc tín hiệu đầu vào của bộ phân giải) được chuyển đổi thành tín hiệu trực giao thông qua cách ly vi phân nội bộ:
V1 u003d KE0sinθ sinωt , V2 u003d KE0cosθ sinωt
Hình 2 Sơ đồ khối cho nguyên tắc hoạt động
Trong đó, θ là góc đầu vào tương tự.
Hai tín hiệu này và góc kỹ thuật số φ của bộ đếm thuận nghịch bên trong được nhân với hệ số nhân của hàm sin và côsin và được xử lý lỗi:
K · E0sinθ cosφ sinωt-KE0cosθ sinφ sinωt u003d KE0sin (θ-φ) sinωt
Các tín hiệu được gửi đến bộ dao động điều khiển điện áp sau khi khuếch đại, phân biệt pha, tích hợp và lọc, nếu θ-φ ≠ 0, bộ dao động điều khiển điện áp thay đổi dữ liệu trong bộ đếm thuận nghịch với các xung đầu ra cho đến khi θ-φ trở thành 0 trong độ chính xác của bộ chuyển đổi, trong quá trình này, bộ chuyển đổi luôn theo dõi sự thay đổi của góc đầu vào θ.
Chức năng truyền của bộ chuyển đổi được thể hiện trong Hình 3.
Hình 3 Chuyển chức năng của bộ chuyển đổi
闭环 函数
Phương thức truyền dữ liệu và trình tự thời gian
Có hai phương pháp để đọc dữ liệu hiệu quả trong bộ chuyển đổi: đọc đồng bộ và đọc không đồng bộ.
(1) Chế độ cấm (đọc đồng bộ):
A: bộ chuyển đổi được kết nối với bus 16 bit. B


 X
X




















 Gold Supplier
Gold Supplier